# T-Robot
**Repository Path**: ChenZTai/T-Robot
## Basic Information
- **Project Name**: T-Robot
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: MIT
- **Default Branch**: main
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2025-10-26
- **Last Updated**: 2025-10-27
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# T-Robot
B站链接:[T-Robot v0.1版本发布!开源全向移动机器人(Based on Micro-ROS)](https://www.bilibili.com/video/BV1px4y177zj/?vd_source=fc4d109b7a90269c1045aa2860dd4925)
 - T-Robot是一个DIY的移动机器人
- 全面拥抱ROS2生态,可实现2D激光雷达地图重建和自主导航
- 纯兴趣向,可作为ROS2入门参考使用
- 底层采用micro-ros,彻底拥抱ROS2生态
- 上层应用ROS2进行各个功能模块的快速开发
- 本项目借鉴和学习了以下仓库:[linorobot2](https://github.com/linorobot/linorobot2) [fishbot](https://github.com/fishros/fishbot) [turtlebot3](https://github.com/ROBOTIS-GIT/turtlebot3)
- **注意:仅在ros2-foxy下进行了测试**
# 0 仓库资料说明
- images:一些照片
- firmware:底层固件
- ros2_packages:ros功能包
- 3D-models:三维模型
# 1 机器人硬件部分
**均为淘宝采购,为避免广告嫌疑,不放链接~**
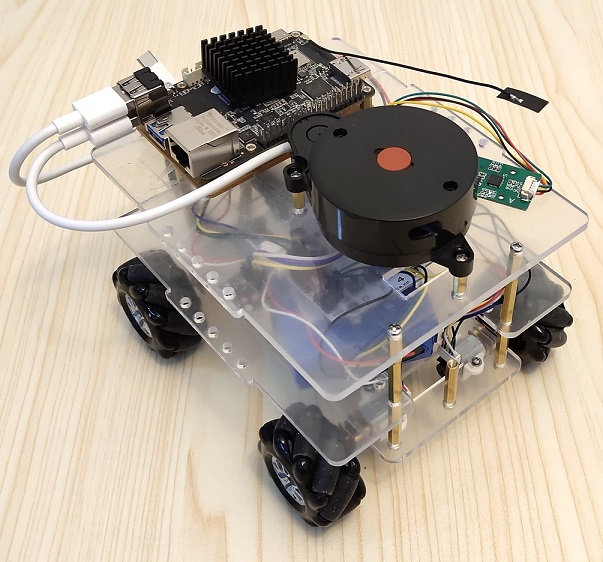
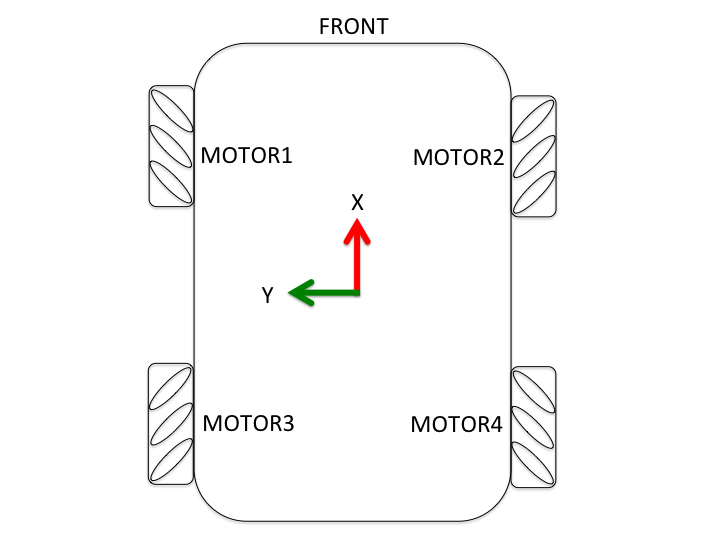
- **机器人底盘布局**
- T-Robot是一个DIY的移动机器人
- 全面拥抱ROS2生态,可实现2D激光雷达地图重建和自主导航
- 纯兴趣向,可作为ROS2入门参考使用
- 底层采用micro-ros,彻底拥抱ROS2生态
- 上层应用ROS2进行各个功能模块的快速开发
- 本项目借鉴和学习了以下仓库:[linorobot2](https://github.com/linorobot/linorobot2) [fishbot](https://github.com/fishros/fishbot) [turtlebot3](https://github.com/ROBOTIS-GIT/turtlebot3)
- **注意:仅在ros2-foxy下进行了测试**
# 0 仓库资料说明
- images:一些照片
- firmware:底层固件
- ros2_packages:ros功能包
- 3D-models:三维模型
# 1 机器人硬件部分
**均为淘宝采购,为避免广告嫌疑,不放链接~**
- **机器人底盘布局**
 - **主控**:**esp32** (ESP-WROOM-32)+**旭日x3派**(2GB)
- **激光雷达**:LD14
- **IMU**:MPU9250
- **电机**: WGA12-N20直流减速电机 (12V, 1:50减速比)
- **电机驱动芯片**:4颗RZ7889
- **编码器**:AB双相增量式磁性霍尔编码器
- **电源**:12V锂电池;
- 12V驱动电机;外置12V转5V模块提供DC-5V输出(最大电流4A);
- **轮子**:4麦轮,直径48mm
- **结构件**:切割亚克力板、3D打印
# 2 底层固件部分
## 2.0 固件说明
- 此固件基于Arduino框架,适用于esp32系列;不推荐使用ArduinoIDE进行编译(可能报错);
- 推荐使用VScode+platformio,固件相关依赖可通过`platformio.ini`自动安装;
- 基于[micro_ros_arduino#v2.0.5foxy](https://github.com/micro-ROS/micro_ros_arduino#v2.0.5-foxy),可自行更改为其他版本,如`galactic`,`humble`等(可能需要极少的修改);
- 由于`micro_ros_arduino`并不是原生支持`platformio`,因此在`platformio.ini`中需要手动指定相应硬件平台的`libmicroros.a`,使用如下命令(以esp32为例):
```bash
build_flags =
-L $PROJECT_DIR/lib/micro_ros_arduino/src/esp32/ -l libmicroros
```
对官方micro_ros_arduino库进行了rebuild,因此不可以直接使用官方的库
- 若要使用官方micro_ros_arduino,需要更改odomertry message的Qos为default:
- **改为default会导致发布频率降低**;
```c++
//!!! 更改rclc_publisher_init_best_effort为rclc_publisher_init_default !!!
RCCHECK(rclc_publisher_init_best_effort(
&odom_publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(nav_msgs, msg, Odometry),
"odom"));
```
- 使用wifi与上位机进行通讯;
- 若使用串口,确保串口波特率在480600bps以上,并修改src/main.cpp:
```c++
set_microros_transports();
//set_microros_wifi_transports("WIFI名称", "密码", "上位机IP", 8888);
```
## 2.1 各模块说明
### 2.1.1 lib/config
包含大部分宏定义,引脚定义等。
### 2.1.2 lib/encoder
c++封装的适用于esp32的编码器库,原作者仓库地址:[ESP32encoder](https://github.com/madhephaestus/ESP32Encoder.git)
- 本项目对其进行了必要修改,增加了`getRPM()`函数,以直接获取转速信息。
```c++
float ESP32Encoder::getRPM(int counts_per_rev) //counts_per_rev:每转一圈的编码器计数
{
counts_per_rev_ = counts_per_rev;
int64_t encoder_ticks = getCount();
// this function calculates the motor's RPM based on encoder ticks and delta time
unsigned long current_time = micros();
unsigned long dt = current_time - prev_update_time_;
// convert the time from milliseconds to minutes
double dtm = (double)dt / 60000000;
double delta_ticks = encoder_ticks - prev_encoder_ticks_;
// calculate wheel's speed (RPM)
prev_update_time_ = current_time;
prev_encoder_ticks_ = encoder_ticks;
return ((delta_ticks / counts_per_rev_) / dtm);
}
```
- 可配置实现不同的编码器计数方式:
```c++
//file: ESP32encoder.h
void attachSingleEdge(int aPintNumber, int bPinNumber); //1倍
void attachHalfQuad(int aPintNumber, int bPinNumber); //2倍
void attachFullQuad(int aPintNumber, int bPinNumber); //4倍
```
### 2.1.3 lib/imu
- `imu_interface.h`
- 定义了IMU的`ros2 imu message`格式,可直接发送给ROS/ROS2使用;
- `IMUInterface()`构造函数中初始化了`imu_msg.header`相关信息,不同版本写法略有不同;
- 抽象了4个虚函数,方便适配不同类型的IMU;
```c++
//file: imu_interface.h
virtual geometry_msgs__msg__Vector3 readAccelerometer() = 0;
virtual geometry_msgs__msg__Vector3 readGyroscope() = 0;
virtual bool startSensor() = 0;
virtual void calibrateGyro()=0;
```
- `default_imu.h`
- 依赖[MPU9250库](https://github.com/hideakitai/MPU9250.git),该库可通过platformio.ini文件进行自动安装,也可以手动下载添加;
- 对`imu_interface.h`中的4个虚函数进行了实现;
### 2.1.4 lib/kinematics
c++封装的适用于求解小车底盘正逆运动学的库。适用于两轮差分、阿克曼、麦轮等。该库原地址:[kinematics](https://github.com/linorobot/linorobot2_hardware/tree/galactic/firmware/lib/kinematics)
小车轮距、轮径、转速等信息在`lib/config`中定义;
- 核心函数1:由线速度和角速度推算小车车轮转速
```c++
rpm getRPM(float linear_x, float linear_y, float angular_z);
```
- 核心函数2:由小车车轮转速推算线速度和角速度
```c++
velocities getVelocities(int rpm1, int rpm2, int rpm3, int rpm4);
```
### 2.1.5 lib/motor
`motor_interface.h`抽象了电机的各个功能,如正转、反转、停机等;
`motor.h`继承了`motor_interface`并对其各个功能进行了实现,并添加了`pwm_offset`;
`pwm_offset`是为了解决一些电机在低占空比pwm驱动下,电机不转动的问题;
### 2.1.6 lib/odemetry
定义了里程计`nav_msgs/msg/odometry`,用于发布`odometry message`;
- 核心函数1:获取当前的`odometry message`数据
```c++
nav_msgs__msg__Odometry Odometry::getData()
{
return odom_msg_;
}
```
- 核心函数2:传入速度信息,更新`odometry message`数据
```c++
void update(float vel_dt, float linear_vel_x, float linear_vel_y, float angular_vel_z);
```
### 2.1.7 lib/pid
顾名思义,电机的PID控制,不多解释了,看代码~
### 2.1.8 lib/micro_ros_arduino
基于官方的[micro_ros_arduino#v2.0.5foxy](https://github.com/micro-ROS/micro_ros_arduino#v2.0.5-foxy),对其进行了必要修改,并进行了rebuild:
- 修改`UCLIENT_CUSTOM_TRANSPORT_MTU=1024`,使得采用best_effort的传输策略时,可以传输大于512Bytes的数据(主要是odometry message);
- 修改`RMW_UXRCE_MAX_HISTORY=2`,减少RAM使用,避免内存溢出;
- 具体rebuild步骤可参考:https://github.com/micro-ROS/micro_ros_arduino/issues/1221#issuecomment-1329923473
### 2.1.9 src/main.cpp
- 初始化编码器、pid控制、电机等
- 创建2个publisher: odom和imu
- 创建1个subscriber: cmd_vel
- 创建3个软件定时器:2个用于publisher发布;1个用于控制机器人移动;
# 3 ROS功能包部分
## 3.1 ld14
- 激光雷达的功能包,一般由雷达厂家提供
## 3.2 robot_bringup
- 放置robot开机启动的程序(目前只有一个default.launch.py)
### 3.2.1 default.launch.py
- 依次启动激光雷达、robot_description、micro_agent等等
## 3.3 robot_description
- 主要放置机器人描述文件,即urdf
- 加载stl文件报错时,可参考[fix malformed stl](https://gist.github.com/awesomebytes/2595b1dc41831c804a4f)
## 3.4 robot_cartographer
- 利用cartoprapher进行建图,具体信息自行学习cartographer。
# 4 已知问题
- IMU坐标系未与ROS默认的坐标系对齐,需要重新对齐,后续有进度再更新。
- 因为IMU坐标系问题,采用EKF融合IMU和Odometry会出错,故直接使用编码器直出Odom。
- Odom的更新频率目前维持在40Hz,再高无法达到,似乎串口波特率到极限了;可尝试wifi通讯。
- 未添加camera驱动,因为后续有使用camera进行再次开发的想法,等待后续更新。
- **主控**:**esp32** (ESP-WROOM-32)+**旭日x3派**(2GB)
- **激光雷达**:LD14
- **IMU**:MPU9250
- **电机**: WGA12-N20直流减速电机 (12V, 1:50减速比)
- **电机驱动芯片**:4颗RZ7889
- **编码器**:AB双相增量式磁性霍尔编码器
- **电源**:12V锂电池;
- 12V驱动电机;外置12V转5V模块提供DC-5V输出(最大电流4A);
- **轮子**:4麦轮,直径48mm
- **结构件**:切割亚克力板、3D打印
# 2 底层固件部分
## 2.0 固件说明
- 此固件基于Arduino框架,适用于esp32系列;不推荐使用ArduinoIDE进行编译(可能报错);
- 推荐使用VScode+platformio,固件相关依赖可通过`platformio.ini`自动安装;
- 基于[micro_ros_arduino#v2.0.5foxy](https://github.com/micro-ROS/micro_ros_arduino#v2.0.5-foxy),可自行更改为其他版本,如`galactic`,`humble`等(可能需要极少的修改);
- 由于`micro_ros_arduino`并不是原生支持`platformio`,因此在`platformio.ini`中需要手动指定相应硬件平台的`libmicroros.a`,使用如下命令(以esp32为例):
```bash
build_flags =
-L $PROJECT_DIR/lib/micro_ros_arduino/src/esp32/ -l libmicroros
```
对官方micro_ros_arduino库进行了rebuild,因此不可以直接使用官方的库
- 若要使用官方micro_ros_arduino,需要更改odomertry message的Qos为default:
- **改为default会导致发布频率降低**;
```c++
//!!! 更改rclc_publisher_init_best_effort为rclc_publisher_init_default !!!
RCCHECK(rclc_publisher_init_best_effort(
&odom_publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(nav_msgs, msg, Odometry),
"odom"));
```
- 使用wifi与上位机进行通讯;
- 若使用串口,确保串口波特率在480600bps以上,并修改src/main.cpp:
```c++
set_microros_transports();
//set_microros_wifi_transports("WIFI名称", "密码", "上位机IP", 8888);
```
## 2.1 各模块说明
### 2.1.1 lib/config
包含大部分宏定义,引脚定义等。
### 2.1.2 lib/encoder
c++封装的适用于esp32的编码器库,原作者仓库地址:[ESP32encoder](https://github.com/madhephaestus/ESP32Encoder.git)
- 本项目对其进行了必要修改,增加了`getRPM()`函数,以直接获取转速信息。
```c++
float ESP32Encoder::getRPM(int counts_per_rev) //counts_per_rev:每转一圈的编码器计数
{
counts_per_rev_ = counts_per_rev;
int64_t encoder_ticks = getCount();
// this function calculates the motor's RPM based on encoder ticks and delta time
unsigned long current_time = micros();
unsigned long dt = current_time - prev_update_time_;
// convert the time from milliseconds to minutes
double dtm = (double)dt / 60000000;
double delta_ticks = encoder_ticks - prev_encoder_ticks_;
// calculate wheel's speed (RPM)
prev_update_time_ = current_time;
prev_encoder_ticks_ = encoder_ticks;
return ((delta_ticks / counts_per_rev_) / dtm);
}
```
- 可配置实现不同的编码器计数方式:
```c++
//file: ESP32encoder.h
void attachSingleEdge(int aPintNumber, int bPinNumber); //1倍
void attachHalfQuad(int aPintNumber, int bPinNumber); //2倍
void attachFullQuad(int aPintNumber, int bPinNumber); //4倍
```
### 2.1.3 lib/imu
- `imu_interface.h`
- 定义了IMU的`ros2 imu message`格式,可直接发送给ROS/ROS2使用;
- `IMUInterface()`构造函数中初始化了`imu_msg.header`相关信息,不同版本写法略有不同;
- 抽象了4个虚函数,方便适配不同类型的IMU;
```c++
//file: imu_interface.h
virtual geometry_msgs__msg__Vector3 readAccelerometer() = 0;
virtual geometry_msgs__msg__Vector3 readGyroscope() = 0;
virtual bool startSensor() = 0;
virtual void calibrateGyro()=0;
```
- `default_imu.h`
- 依赖[MPU9250库](https://github.com/hideakitai/MPU9250.git),该库可通过platformio.ini文件进行自动安装,也可以手动下载添加;
- 对`imu_interface.h`中的4个虚函数进行了实现;
### 2.1.4 lib/kinematics
c++封装的适用于求解小车底盘正逆运动学的库。适用于两轮差分、阿克曼、麦轮等。该库原地址:[kinematics](https://github.com/linorobot/linorobot2_hardware/tree/galactic/firmware/lib/kinematics)
小车轮距、轮径、转速等信息在`lib/config`中定义;
- 核心函数1:由线速度和角速度推算小车车轮转速
```c++
rpm getRPM(float linear_x, float linear_y, float angular_z);
```
- 核心函数2:由小车车轮转速推算线速度和角速度
```c++
velocities getVelocities(int rpm1, int rpm2, int rpm3, int rpm4);
```
### 2.1.5 lib/motor
`motor_interface.h`抽象了电机的各个功能,如正转、反转、停机等;
`motor.h`继承了`motor_interface`并对其各个功能进行了实现,并添加了`pwm_offset`;
`pwm_offset`是为了解决一些电机在低占空比pwm驱动下,电机不转动的问题;
### 2.1.6 lib/odemetry
定义了里程计`nav_msgs/msg/odometry`,用于发布`odometry message`;
- 核心函数1:获取当前的`odometry message`数据
```c++
nav_msgs__msg__Odometry Odometry::getData()
{
return odom_msg_;
}
```
- 核心函数2:传入速度信息,更新`odometry message`数据
```c++
void update(float vel_dt, float linear_vel_x, float linear_vel_y, float angular_vel_z);
```
### 2.1.7 lib/pid
顾名思义,电机的PID控制,不多解释了,看代码~
### 2.1.8 lib/micro_ros_arduino
基于官方的[micro_ros_arduino#v2.0.5foxy](https://github.com/micro-ROS/micro_ros_arduino#v2.0.5-foxy),对其进行了必要修改,并进行了rebuild:
- 修改`UCLIENT_CUSTOM_TRANSPORT_MTU=1024`,使得采用best_effort的传输策略时,可以传输大于512Bytes的数据(主要是odometry message);
- 修改`RMW_UXRCE_MAX_HISTORY=2`,减少RAM使用,避免内存溢出;
- 具体rebuild步骤可参考:https://github.com/micro-ROS/micro_ros_arduino/issues/1221#issuecomment-1329923473
### 2.1.9 src/main.cpp
- 初始化编码器、pid控制、电机等
- 创建2个publisher: odom和imu
- 创建1个subscriber: cmd_vel
- 创建3个软件定时器:2个用于publisher发布;1个用于控制机器人移动;
# 3 ROS功能包部分
## 3.1 ld14
- 激光雷达的功能包,一般由雷达厂家提供
## 3.2 robot_bringup
- 放置robot开机启动的程序(目前只有一个default.launch.py)
### 3.2.1 default.launch.py
- 依次启动激光雷达、robot_description、micro_agent等等
## 3.3 robot_description
- 主要放置机器人描述文件,即urdf
- 加载stl文件报错时,可参考[fix malformed stl](https://gist.github.com/awesomebytes/2595b1dc41831c804a4f)
## 3.4 robot_cartographer
- 利用cartoprapher进行建图,具体信息自行学习cartographer。
# 4 已知问题
- IMU坐标系未与ROS默认的坐标系对齐,需要重新对齐,后续有进度再更新。
- 因为IMU坐标系问题,采用EKF融合IMU和Odometry会出错,故直接使用编码器直出Odom。
- Odom的更新频率目前维持在40Hz,再高无法达到,似乎串口波特率到极限了;可尝试wifi通讯。
- 未添加camera驱动,因为后续有使用camera进行再次开发的想法,等待后续更新。