# SmartIMU
**Repository Path**: Hom-Wang/SmartIMU
## Basic Information
- **Project Name**: SmartIMU
- **Description**: 使用 STM32F401C、MPU9250、MS5611
- **Primary Language**: Unknown
- **License**: CC-BY-SA-4.0
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 1
- **Created**: 2015-07-05
- **Last Updated**: 2024-06-04
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
[SmartIMU](https://github.com/Hom-Wang/SmartIMU)
========
* Author : [Hom](http://about.me/Hom)
* Version : v1.2
* Update : 2015/03/11
Description
========
SmartIMU 是一個集成微控制器 ( STM32F401C )、3-Axis 加速度計、3-Axis 陀螺儀、3-Axis 電子羅盤、氣壓計等感測器 ( MPU9250、MS5611 ) 於一體的模組,可以透過 UART/I2C、SPI、USB 來讀取計算出載體的角度、加速度、速度、位移、高度 ... 等等資訊,除了上述,SmartIMU 也另外引出了第二個 SPI 和 4CH PWM,可以獨立成一片飛控板,微型四軸飛行器 [QCopterNano](https://github.com/QCopter/QCopterNano) 即預計使用 SmartIMU 作為飛控。
> 預計建立兩種模式:
> 1. 透過 SPI 讀取 Sensor
> 此方案不須使用到 MCU,可以比"模式2"更接近實時,同時 MCU 也可以做其他處理。
> 2. 透過 MCU 讀取 Sensor
> 此方案可以預先計算姿態來節省飛控負擔,同時會加載 IAP 功能,
> 可以直接透過飛控板來更新程式碼,不需要再做燒錄的動作。
License
========
* 硬體(Hardware)採用 [CC BY-SA 4.0](http://creativecommons.org/licenses/by-sa/4.0/deed.zh_TW) 方式授權
 SmartIMU v1.2 由 Hom 製作,以 創用CC 姓名標示-相同方式分享 4.0 國際 授權條款 釋出。
* 軟體(Software)採用 [MIT License](http://opensource.org/licenses/MIT) 方式授權
Hardware
========
* 控制器 : [STM32F401C](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1810/PF258491) 48Pin 84MHz DSP FPU
* 感測器 : [MPU9250](http://www.invensense.com/mems/gyro/mpu9250.html) + [MS5611](http://www.meas-spec.com/product/pressure/MS5611-01BA03.aspx)
* 其他 : 1*LED
* 外接介面 : 1*UART/I2C、2*SPI、1*USB、2*GPIO
* PCB 尺寸 : 12.70 * 15.24mm
* 設計軟體 [Altium Designer 14](http://www.altium.com/en/products/altium-designer) ( PcbLib use AD [PcbLib v0.12](https://github.com/OpenPCB/AltiumDesigner_PcbLibrary/releases/tag/v0.12) )
SmartIMU v1.4 預計修改:
>1. 修改部分腳位以兼容 MPU65x0。
>2. 修改部分元件 footprint 以方便焊接。
>3. 將氣壓計與慣性元件共用 SPI ( 待確定 )。
>4. 將 STM32F401 更換成 STM32F411 增加處理效能。
>5. 將 MPU9250 更換成 MPU9255 ( 待確定 )。
>6. 將 MS5611 更換成 LPS25HB ( 待確定 )。
>7. 修正 VCAP 電路問題。
>8. 設計新的測試座,以方便測試半孔板。
**** TestBoard
* PCB 尺寸 : 26.16 * 31.75mm
* 設計軟體 [Altium Designer 14](http://www.altium.com/en/products/altium-designer) ( PcbLib use AD [PcbLib v0.12](https://github.com/OpenPCB/AltiumDesigner_PcbLibrary/releases/tag/v0.12) )
SmartIMU v1.2 由 Hom 製作,以 創用CC 姓名標示-相同方式分享 4.0 國際 授權條款 釋出。
* 軟體(Software)採用 [MIT License](http://opensource.org/licenses/MIT) 方式授權
Hardware
========
* 控制器 : [STM32F401C](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1810/PF258491) 48Pin 84MHz DSP FPU
* 感測器 : [MPU9250](http://www.invensense.com/mems/gyro/mpu9250.html) + [MS5611](http://www.meas-spec.com/product/pressure/MS5611-01BA03.aspx)
* 其他 : 1*LED
* 外接介面 : 1*UART/I2C、2*SPI、1*USB、2*GPIO
* PCB 尺寸 : 12.70 * 15.24mm
* 設計軟體 [Altium Designer 14](http://www.altium.com/en/products/altium-designer) ( PcbLib use AD [PcbLib v0.12](https://github.com/OpenPCB/AltiumDesigner_PcbLibrary/releases/tag/v0.12) )
SmartIMU v1.4 預計修改:
>1. 修改部分腳位以兼容 MPU65x0。
>2. 修改部分元件 footprint 以方便焊接。
>3. 將氣壓計與慣性元件共用 SPI ( 待確定 )。
>4. 將 STM32F401 更換成 STM32F411 增加處理效能。
>5. 將 MPU9250 更換成 MPU9255 ( 待確定 )。
>6. 將 MS5611 更換成 LPS25HB ( 待確定 )。
>7. 修正 VCAP 電路問題。
>8. 設計新的測試座,以方便測試半孔板。
**** TestBoard
* PCB 尺寸 : 26.16 * 31.75mm
* 設計軟體 [Altium Designer 14](http://www.altium.com/en/products/altium-designer) ( PcbLib use AD [PcbLib v0.12](https://github.com/OpenPCB/AltiumDesigner_PcbLibrary/releases/tag/v0.12) )
 Software
========
TEST_SmartIMU_ADC
TEST_SmartIMU_IMU
TEST_SmartIMU_LED
TEST_SmartIMU_PWM
TEST_SmartIMU_Systick
TEST_SmartIMU_UART
Related Documents
========
* [Update Records - Hackpad](https://hom.hackpad.com/SmartIMU-E9zzbSI7QyK)
* [Datasheet & BOM - Google Drive](https://drive.google.com/folderview?id=0BzL2wwAot6oPN05nMklQQW0zVHc&usp=drive_web)
View
========
Software
========
TEST_SmartIMU_ADC
TEST_SmartIMU_IMU
TEST_SmartIMU_LED
TEST_SmartIMU_PWM
TEST_SmartIMU_Systick
TEST_SmartIMU_UART
Related Documents
========
* [Update Records - Hackpad](https://hom.hackpad.com/SmartIMU-E9zzbSI7QyK)
* [Datasheet & BOM - Google Drive](https://drive.google.com/folderview?id=0BzL2wwAot6oPN05nMklQQW0zVHc&usp=drive_web)
View
========




更多圖片 [Google+ albums](https://plus.google.com/photos/112822505513154783828/albums/5973678489492691265)
Config
========

 Schematic
========
Schematic
========
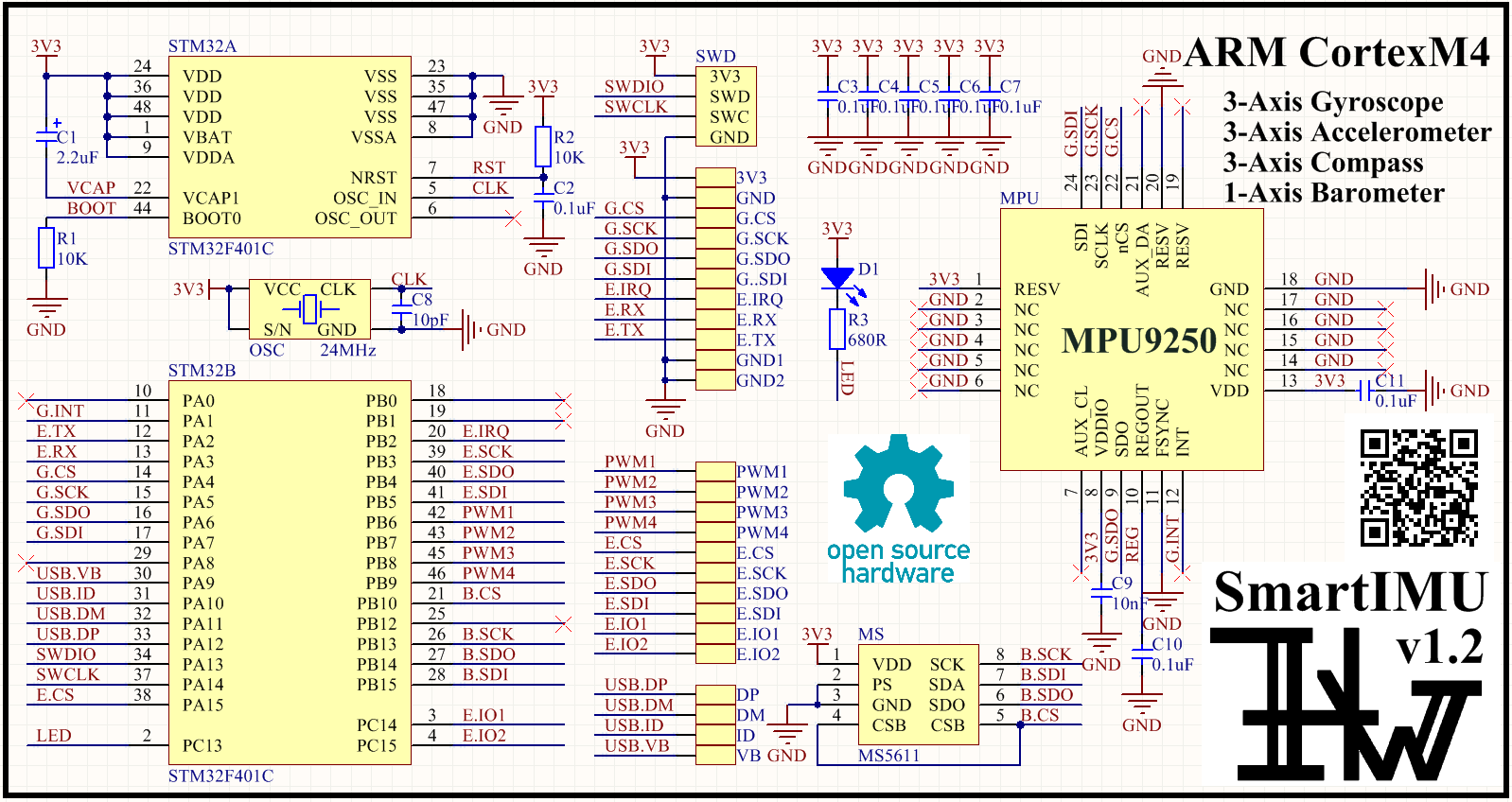 ** ERROR
電路圖上的 VCAP ( C1 ) 應接至 GND,但接至 3V3 版本目前使用尚未出現問題。
** ERROR
電路圖上的 VCAP ( C1 ) 應接至 GND,但接至 3V3 版本目前使用尚未出現問題。