

Fetch the repository succeeded.
This is a LOAM (Lidar Odometry and Mapping) ROS package for continuous rotating 2D laser scanner. This package is a simple modified copy of the original one release by Ji Zhang. The only change on top of the original one is to make it a Catkin package and work under ROS Indigo. Please cite their paper if this package is used.
J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time. Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014.(PDF)(VIDEO)
Wiki Webpage by the Author: http://wiki.ros.org/loam_continuous
Here I assume you have a Catkin worksapce under ~/ros_workspace/catkin_ws.
(1) gitclone the package into your "src" folder.
(2) compile the package
(3) download a ROS bag file for test dataset.
(4) run the package and rosbag file
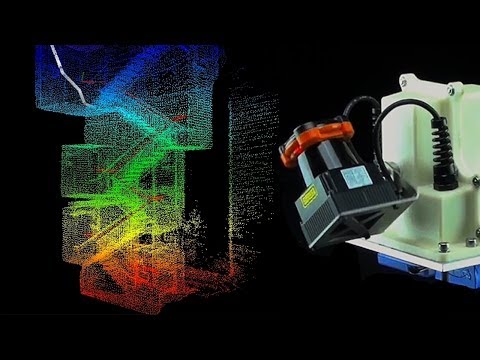
YOU SHOULD SEE A RESULT SIMILAR TO THEIR DEMO VIDEO (robot_city_bridge DEMO VIDEO. GOOD LUCK.
Laser Odometry and Mapping (Loam) is a realtime method for state estimation and mapping using a 3D lidar. The program contains two major threads running in parallel. An "odometry" thread computes motion of the lidar between two sweeps, at a higher frame rate. It also removes distortion in the point cloud caused by motion of the lidar. A "mapping" thread takes the undistorted point cloud and incrementally builds a map, while simultaneously computes pose of the lidar on the map at a lower frame rate. The lidar state estimation is combination of the outputs from the two threads.
If an IMU is available, the orientation (integrated from angular rate) and acceleration measurements are used to deal with general motion of the lidar, while the program takes care of the linear motion.
The program is tested on a laptop with 2.5 GHz quad cores and 6 Gib memory (the program consumes two cores). It uses a continuous spin lidar.
Wiki Webpage: http://wiki.ros.org/loam_continuous
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。







