# M5Stack-Camera
**Repository Path**: damone/M5Stack-Camera
## Basic Information
- **Project Name**: M5Stack-Camera
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2021-02-10
- **Last Updated**: 2021-02-10
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# 摄像机单元固件
[English](https://github.com/m5stack/m5stack-cam-psram/blob/master/README.md) | 中文
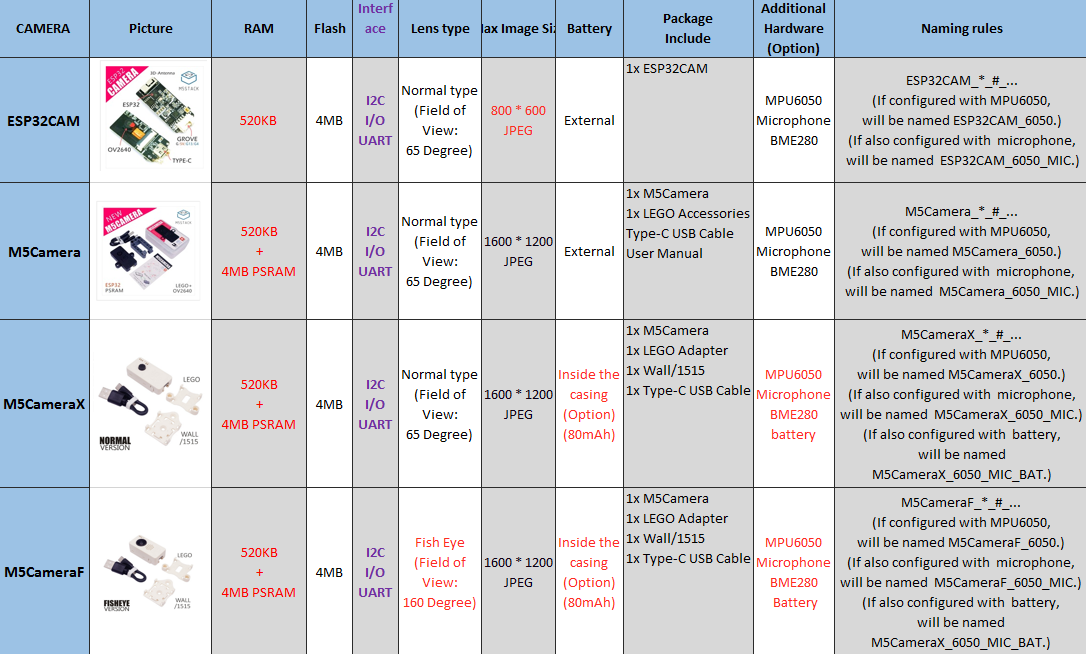
现在,M5Stack有四种类型的摄像机单元,分别有[ESP32CAM](https://docs.m5stack.com/#/zh_CN/unit/esp32cam),[M5Camera (A Model)](https://docs.m5stack.com/#/zh_CN/unit/m5camera),[M5Camera (B Model)](https://docs.m5stack.com/#/zh_CN/unit/m5camera),M5CameraX,[M5CameraF](https://docs.m5stack.com/#/zh_CN/unit/m5camera_f)。
 这些相机之间的主要区别是**内存**,**接口**,**镜头**,**可选硬件**和**相机外壳**。
## 固件说明
该仓库的代码适于这些板子,每个文件夹对应一种功能。
- [mpu6050](https://github.com/m5stack/m5stack-cam-psram/tree/master/mpu6050) -> 焊接 MPU6050 芯片之后,陀螺仪的例程 (idf-3.3)
- [qr](https://github.com/m5stack/m5stack-cam-psram/tree/master/qr) -> 二维码识别的例程 (idf-3.3)
- [uart](https://github.com/m5stack/m5stack-cam-psram/tree/master/uart) -> 与 [M5Core](https://docs.m5stack.com/#/zh_CN/core/basic) 之间进行串口通信的例程 (idf-3.3)
- [wifi](https://github.com/m5stack/m5stack-cam-psram/tree/master/wifi) -> 通过 WIFI 传输图像的例程 (idf-4.0)
- [face_recognize](https://github.com/m5stack/m5stack-cam-psram/tree/master/face_recognize) -> 人脸识别的例程 (idf-3.3)
**注意,在编译下载代码之前,需要先执行以下操作,配置成对应的板子。**
第一步:搭建 ESP-IDF 开发环境
- [https://docs.espressif.com/projects/esp-idf/en/latest/get-started/index.html](https://docs.espressif.com/projects/esp-idf/en/latest/get-started/index.html)
第二步:搭建好 ESP-IDF 环境之后,在终端 Terminal 中,执行 `make menuconfig`
第三步:配置摄像头型号
这些相机之间的主要区别是**内存**,**接口**,**镜头**,**可选硬件**和**相机外壳**。
## 固件说明
该仓库的代码适于这些板子,每个文件夹对应一种功能。
- [mpu6050](https://github.com/m5stack/m5stack-cam-psram/tree/master/mpu6050) -> 焊接 MPU6050 芯片之后,陀螺仪的例程 (idf-3.3)
- [qr](https://github.com/m5stack/m5stack-cam-psram/tree/master/qr) -> 二维码识别的例程 (idf-3.3)
- [uart](https://github.com/m5stack/m5stack-cam-psram/tree/master/uart) -> 与 [M5Core](https://docs.m5stack.com/#/zh_CN/core/basic) 之间进行串口通信的例程 (idf-3.3)
- [wifi](https://github.com/m5stack/m5stack-cam-psram/tree/master/wifi) -> 通过 WIFI 传输图像的例程 (idf-4.0)
- [face_recognize](https://github.com/m5stack/m5stack-cam-psram/tree/master/face_recognize) -> 人脸识别的例程 (idf-3.3)
**注意,在编译下载代码之前,需要先执行以下操作,配置成对应的板子。**
第一步:搭建 ESP-IDF 开发环境
- [https://docs.espressif.com/projects/esp-idf/en/latest/get-started/index.html](https://docs.espressif.com/projects/esp-idf/en/latest/get-started/index.html)
第二步:搭建好 ESP-IDF 环境之后,在终端 Terminal 中,执行 `make menuconfig`
第三步:配置摄像头型号

 第四步:打开psram
第四步:打开psram

 第五步:在终端 Terminal 中,执行 `make`,确保编译无误
第六步:在终端 Terminal 中,执行 `make flash`,下载程序
第七步:在终端 Terminal 中,执行 `make monitor`,打开串口监视
### 不同版本相机的比较 ( ESP32CAM, M5Camera (A Model), M5Camera (B Model), M5CameraF )
下图是他们的对照表。 (注意:因为接口有很多不同的引脚,所以我做了一个单独的表进行比较。)
- 如果你想**查看**与它们的详细区别,请点击[这里](https://shimo.im/sheets/gP96C8YTdyjGgKQC)。
- 如果您想**下载**细节差异,请点击[这里](https://github.com/m5stack/M5-Schematic/blob/master/Units/m5camera/M5%20Camera%20Detailed%20Comparison.xlsx)。
第五步:在终端 Terminal 中,执行 `make`,确保编译无误
第六步:在终端 Terminal 中,执行 `make flash`,下载程序
第七步:在终端 Terminal 中,执行 `make monitor`,打开串口监视
### 不同版本相机的比较 ( ESP32CAM, M5Camera (A Model), M5Camera (B Model), M5CameraF )
下图是他们的对照表。 (注意:因为接口有很多不同的引脚,所以我做了一个单独的表进行比较。)
- 如果你想**查看**与它们的详细区别,请点击[这里](https://shimo.im/sheets/gP96C8YTdyjGgKQC)。
- 如果您想**下载**细节差异,请点击[这里](https://github.com/m5stack/M5-Schematic/blob/master/Units/m5camera/M5%20Camera%20Detailed%20Comparison.xlsx)。
 #### 引脚比较
#### 引脚比较
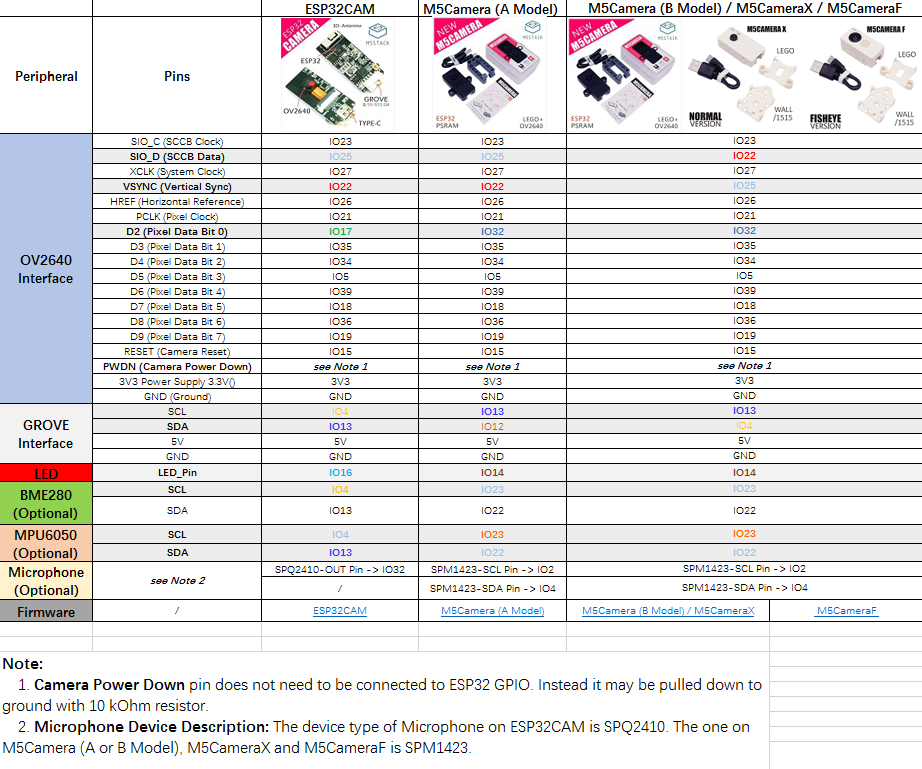 ## 重要的是要记住
- 除了使用带有JPEG或CIF更低分辨率外,驱动程序还需要安装和激活PSRAM。
- 使用YUV或RGB会给芯片带来很大的压力,因为写入PSRAM并不是特别快。 结果是图像数据可能丢失。 如果启用WiFi,则尤其如此。 如果您需要RGB数据,建议使用`fmt2rgb888`或`fmt2bmp`/`frame2bmp`捕获JPEG然后转换为RGB。
- 当使用1帧缓冲区时,驱动程序将等待当前帧完成(VSYNC)并启动I2S DMA。 获取帧后,I2S将停止,帧缓冲区返回到应用程序。 这种方法可以更好地控制系统,但会导致获得帧的时间更长。
- 当使用2个或更多帧缓冲时,I2S以连续模式运行,每个帧被推送到应用程序可以访问的队列。 这种方法会给CPU/Memory带来更大的压力,但允许帧速率加倍。 请仅使用JPEG。
## API
### Get img data
0
```c
camera_fb_t * fb = NULL;
// will get a img frame
fb = esp_camera_fb_get();
// img buf
uint8_t *buf = fb->buf;
// img buf len
unit32_t buf_len = fb->len;
/* --- do some something --- */
// need return img buf
esp_camera_fb_return(fb);
```
### Set ov2640 config
```c
sensor_t *s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_VGA);
s->set_quality(s, 10);
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
...
```
Detailed view [sensor.h](https://github.com/m5stack/m5stack-cam-psram/blob/master/mpu6050/components/esp32-camera/driver/include/sensor.h)
## Examples
### Initialization
```c
#include "esp_camera.h"
static camera_config_t camera_config = {
.pin_reset = CAM_PIN_RESET,
.pin_xclk = CAM_PIN_XCLK,
.pin_sscb_sda = CAM_PIN_SIOD,
.pin_sscb_scl = CAM_PIN_SIOC,
.pin_d7 = CAM_PIN_D7,
.pin_d6 = CAM_PIN_D6,
.pin_d5 = CAM_PIN_D5,
.pin_d4 = CAM_PIN_D4,
.pin_d3 = CAM_PIN_D3,
.pin_d2 = CAM_PIN_D2,
.pin_d1 = CAM_PIN_D1,
.pin_d0 = CAM_PIN_D0,
.pin_vsync = CAM_PIN_VSYNC,
.pin_href = CAM_PIN_HREF,
.pin_pclk = CAM_PIN_PCLK,
//XCLK 20MHz or 10MHz
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG,//YUV422,GRAYSCALE,RGB565,JPEG
.frame_size = FRAMESIZE_UXGA,//QQVGA-UXGA Do not use sizes above QVGA when not JPEG
.jpeg_quality = 12, //0-63 lower number means higher quality
.fb_count = 1 //if more than one, i2s runs in continuous mode. Use only with JPEG
};
esp_err_t camera_init(){
//power up the camera if PWDN pin is defined
if(CAM_PIN_PWDN != -1){
pinMode(CAM_PIN_PWDN, OUTPUT);
digitalWrite(CAM_PIN_PWDN, LOW);
}
//initialize the camera
esp_err_t err = esp_camera_init(&camera_config);
if (err != ESP_OK) {
ESP_LOGE(TAG, "Camera Init Failed");
return err;
}
return ESP_OK;
}
esp_err_t camera_capture(){
//acquire a frame
camera_fb_t * fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera Capture Failed");
return ESP_FAIL;
}
//replace this with your own function
process_image(fb->width, fb->height, fb->format, fb->buf, fb->len);
//return the frame buffer back to the driver for reuse
esp_camera_fb_return(fb);
return ESP_OK;
}
```
### JPEG HTTP Capture
```c
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
esp_err_t jpg_httpd_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t fb_len = 0;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
res = httpd_resp_set_type(req, "image/jpeg");
if(res == ESP_OK){
res = httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
}
if(res == ESP_OK){
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
ESP_LOGI(TAG, "JPG: %uKB %ums", (uint32_t)(fb_len/1024), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
```
### JPEG HTTP Stream
```c
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
esp_err_t jpg_stream_httpd_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len;
uint8_t * _jpg_buf;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
if(!jpeg_converted){
ESP_LOGE(TAG, "JPEG compression failed");
esp_camera_fb_return(fb);
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb->format != PIXFORMAT_JPEG){
free(_jpg_buf);
}
esp_camera_fb_return(fb);
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
ESP_LOGI(TAG, "MJPG: %uKB %ums (%.1ffps)",
(uint32_t)(_jpg_buf_len/1024),
(uint32_t)frame_time, 1000.0 / (uint32_t)frame_time);
}
last_frame = 0;
return res;
}
```
### BMP HTTP Capture
```c
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
esp_err_t bmp_httpd_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
uint8_t * buf = NULL;
size_t buf_len = 0;
bool converted = frame2bmp(fb, &buf, &buf_len);
esp_camera_fb_return(fb);
if(!converted){
ESP_LOGE(TAG, "BMP conversion failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
res = httpd_resp_set_type(req, "image/x-windows-bmp")
|| httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.bmp")
|| httpd_resp_send(req, (const char *)buf, buf_len);
free(buf);
int64_t fr_end = esp_timer_get_time();
ESP_LOGI(TAG, "BMP: %uKB %ums", (uint32_t)(buf_len/1024), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
```
## 重要的是要记住
- 除了使用带有JPEG或CIF更低分辨率外,驱动程序还需要安装和激活PSRAM。
- 使用YUV或RGB会给芯片带来很大的压力,因为写入PSRAM并不是特别快。 结果是图像数据可能丢失。 如果启用WiFi,则尤其如此。 如果您需要RGB数据,建议使用`fmt2rgb888`或`fmt2bmp`/`frame2bmp`捕获JPEG然后转换为RGB。
- 当使用1帧缓冲区时,驱动程序将等待当前帧完成(VSYNC)并启动I2S DMA。 获取帧后,I2S将停止,帧缓冲区返回到应用程序。 这种方法可以更好地控制系统,但会导致获得帧的时间更长。
- 当使用2个或更多帧缓冲时,I2S以连续模式运行,每个帧被推送到应用程序可以访问的队列。 这种方法会给CPU/Memory带来更大的压力,但允许帧速率加倍。 请仅使用JPEG。
## API
### Get img data
0
```c
camera_fb_t * fb = NULL;
// will get a img frame
fb = esp_camera_fb_get();
// img buf
uint8_t *buf = fb->buf;
// img buf len
unit32_t buf_len = fb->len;
/* --- do some something --- */
// need return img buf
esp_camera_fb_return(fb);
```
### Set ov2640 config
```c
sensor_t *s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_VGA);
s->set_quality(s, 10);
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
...
```
Detailed view [sensor.h](https://github.com/m5stack/m5stack-cam-psram/blob/master/mpu6050/components/esp32-camera/driver/include/sensor.h)
## Examples
### Initialization
```c
#include "esp_camera.h"
static camera_config_t camera_config = {
.pin_reset = CAM_PIN_RESET,
.pin_xclk = CAM_PIN_XCLK,
.pin_sscb_sda = CAM_PIN_SIOD,
.pin_sscb_scl = CAM_PIN_SIOC,
.pin_d7 = CAM_PIN_D7,
.pin_d6 = CAM_PIN_D6,
.pin_d5 = CAM_PIN_D5,
.pin_d4 = CAM_PIN_D4,
.pin_d3 = CAM_PIN_D3,
.pin_d2 = CAM_PIN_D2,
.pin_d1 = CAM_PIN_D1,
.pin_d0 = CAM_PIN_D0,
.pin_vsync = CAM_PIN_VSYNC,
.pin_href = CAM_PIN_HREF,
.pin_pclk = CAM_PIN_PCLK,
//XCLK 20MHz or 10MHz
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG,//YUV422,GRAYSCALE,RGB565,JPEG
.frame_size = FRAMESIZE_UXGA,//QQVGA-UXGA Do not use sizes above QVGA when not JPEG
.jpeg_quality = 12, //0-63 lower number means higher quality
.fb_count = 1 //if more than one, i2s runs in continuous mode. Use only with JPEG
};
esp_err_t camera_init(){
//power up the camera if PWDN pin is defined
if(CAM_PIN_PWDN != -1){
pinMode(CAM_PIN_PWDN, OUTPUT);
digitalWrite(CAM_PIN_PWDN, LOW);
}
//initialize the camera
esp_err_t err = esp_camera_init(&camera_config);
if (err != ESP_OK) {
ESP_LOGE(TAG, "Camera Init Failed");
return err;
}
return ESP_OK;
}
esp_err_t camera_capture(){
//acquire a frame
camera_fb_t * fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera Capture Failed");
return ESP_FAIL;
}
//replace this with your own function
process_image(fb->width, fb->height, fb->format, fb->buf, fb->len);
//return the frame buffer back to the driver for reuse
esp_camera_fb_return(fb);
return ESP_OK;
}
```
### JPEG HTTP Capture
```c
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
esp_err_t jpg_httpd_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t fb_len = 0;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
res = httpd_resp_set_type(req, "image/jpeg");
if(res == ESP_OK){
res = httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
}
if(res == ESP_OK){
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
ESP_LOGI(TAG, "JPG: %uKB %ums", (uint32_t)(fb_len/1024), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
```
### JPEG HTTP Stream
```c
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
esp_err_t jpg_stream_httpd_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len;
uint8_t * _jpg_buf;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
if(!jpeg_converted){
ESP_LOGE(TAG, "JPEG compression failed");
esp_camera_fb_return(fb);
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb->format != PIXFORMAT_JPEG){
free(_jpg_buf);
}
esp_camera_fb_return(fb);
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
ESP_LOGI(TAG, "MJPG: %uKB %ums (%.1ffps)",
(uint32_t)(_jpg_buf_len/1024),
(uint32_t)frame_time, 1000.0 / (uint32_t)frame_time);
}
last_frame = 0;
return res;
}
```
### BMP HTTP Capture
```c
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
esp_err_t bmp_httpd_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
ESP_LOGE(TAG, "Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
uint8_t * buf = NULL;
size_t buf_len = 0;
bool converted = frame2bmp(fb, &buf, &buf_len);
esp_camera_fb_return(fb);
if(!converted){
ESP_LOGE(TAG, "BMP conversion failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
res = httpd_resp_set_type(req, "image/x-windows-bmp")
|| httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.bmp")
|| httpd_resp_send(req, (const char *)buf, buf_len);
free(buf);
int64_t fr_end = esp_timer_get_time();
ESP_LOGI(TAG, "BMP: %uKB %ums", (uint32_t)(buf_len/1024), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
```