# Location
**Repository Path**: hzustc/Location
## Basic Information
- **Project Name**: Location
- **Description**: gps and imu fusion
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 2
- **Forks**: 1
- **Created**: 2021-04-15
- **Last Updated**: 2025-06-01
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# Location
> 定位是驾驶导航过程中是最基础的一步,也是十分关键的一步,一个准确的定位可以有效提高绑路的精度,也能更加精准感知驾驶形态的变化,由于本项目主要基于手机做导航定位,目前采用的是手机内置的传感器数据(陀螺仪,加速计,地磁计)以及GPS数据融合定位。
## 项目所需的传感器.
- [X] 陀螺仪(x, y, z).
- [X] 加速计(x, y, z).
- [X] 地磁计(x, y, z).
- [X] 重力感应器(x, y, z).
- [X] 方向传感器(roll, pitch, yaw).
- [X] 指南针(degree).
- [X] 道路信息(距下个路口的距离, 道路方向, 道路类型).
- [X] GPS(经度, 纬度, 海拔, 精度, 速度, 方向, 时间戳).
## 一些实现细节
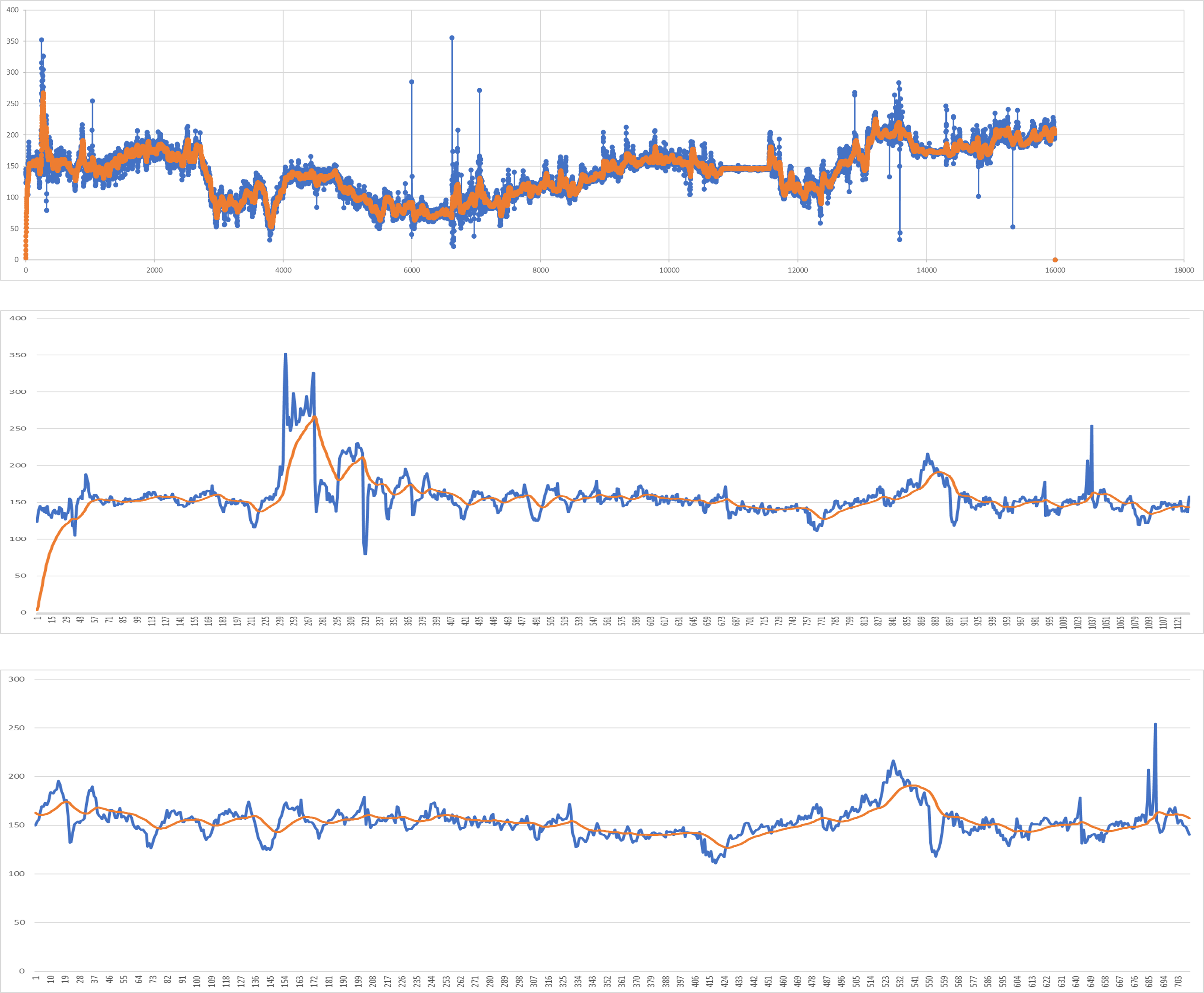
- 传感器噪声过滤与修正.
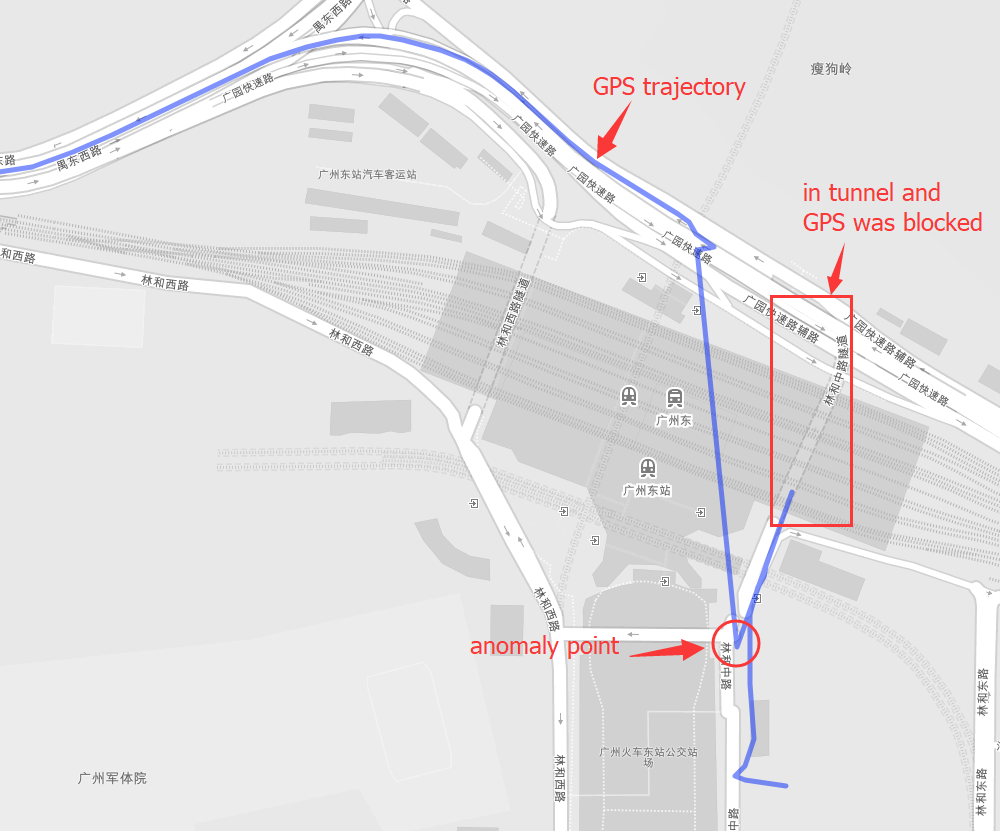
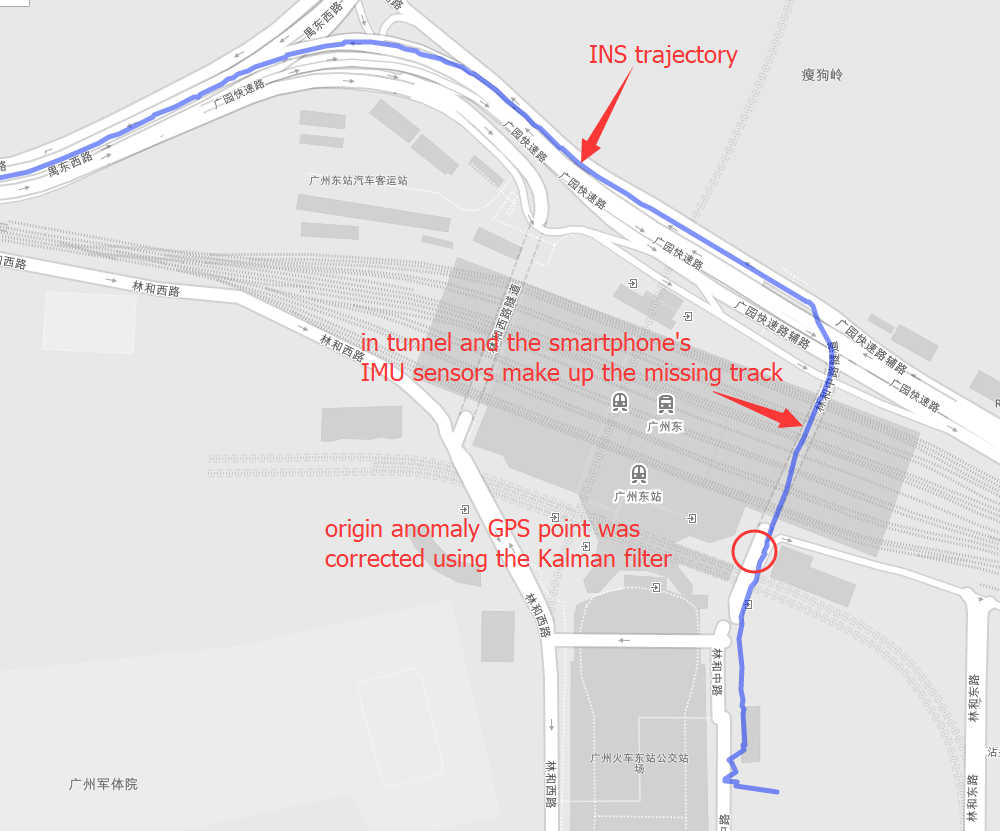
 - 基于非耦合的GPS融合INS.
- 基于非耦合的GPS融合INS.
 ## 快速开始
确保安装了gcc和cmake, 下载本项目到你的项目下
```
git clone https://github.com/yyccR/Location.git
```
在项目根目录下新建`CMakeLists.txt`, 同时添加如下:
```
include_directories(${PROJECT_SOURCE_DIR}/Location/include/eigen3)
include_directories(${PROJECT_SOURCE_DIR}/Location/math)
add_subdirectory(Location/math)
include_directories(${PROJECT_SOURCE_DIR}/Location/models)
add_subdirectory(Location/models)
include_directories(${PROJECT_SOURCE_DIR}/Location/location)
add_subdirectory(Location/location)
include_directories(${PROJECT_SOURCE_DIR}/Location/sensor)
add_subdirectory(Location/sensor)
include_directories(${PROJECT_SOURCE_DIR}/Location/system)
add_subdirectory(Location/system)
target_link_libraries(${PROJECT_NAME} Location_math)
target_link_libraries(${PROJECT_NAME} Location_models)
target_link_libraries(${PROJECT_NAME} Location_location)
target_link_libraries(${PROJECT_NAME} Location_sensor)
target_link_libraries(${PROJECT_NAME} Location_system)
target_link_libraries(${PROJECT_NAME} Location_test)
```
在main文件里添加如下测试代码.
```
#include
#include
#include "sensor/GPS.h"
#include "location/Location.h"
using namespace Eigen;
using namespace std;
int main() {
Location location;
Vector3d gyro_data_v(0.004263,0.019169,-0.001014);
Vector3d mag_data_v(-2.313675,-82.446960,-366.183838);
Vector3d acc_data_v(0.105081,0.108075,9.774973);
VectorXd gps_data_v(7);
gps_data_v << 114.174118,22.283789,0.0,0.0,24.0,0.0,1554348968704.665039;
Vector3d g_data_v(0.094139, 0.107857,9.808955);
Vector3d ornt_data_v(-0.549866,0.629957,-0.069398);
Vector3d road_data(1000.0, 0.0, 0);
location.PredictCurrentPosition(gyro_data_v,acc_data_v,mag_data_v,gps_data_v,g_data_v,ornt_data_v, road_data);
cout << location.GetGNSSINS().lng << " " << location.GetGNSSINS().lat << endl;
return 0;
}
```
如果输出 `114.174 22.2838` 表示已经成功内嵌了本项目.
## 数据格式.
- 陀螺仪(x, y, z), 单位 rad/s
- 加速计(x, y, z), 单位 m/s²
- 地磁计(x, y, z), 单位 μt
- 重力感应器(x, y, z), 单位 m/s²
- 方向传感器(roll, pitch, yaw), 单位 角度(degree)
手机并没有方向传感器, 这个所谓的传感器数据是手机底层算法计算得到的。
- 指南针(degree), 单位 角度(degree)
- 道路信息(距离下个路口距离, 当前位置道路方向, 道路类型编码)
如果拿不到道路数据, 则全部填0即可, `(0.0, 0.0, 0.0)`
- GPS(lng, lat, alt, accuracy, speed, bearing, t)
- lng, 经度, double
- lat, 纬度, double
- alt, 海拔, double
- accuracy, 精度, double
- speed, 速度, double
- bearing, 方向, double, 单位 角度(degree)
- t, 时间戳, 单位 毫秒(millisecond)
## 更加详细的调用细节
详见 docs/apiCallDetails.md
## TODO
- [X] CMakeLists 优化.
- [ ] 清理垃圾代码.
- [ ] 模板化.
- [ ] 替换普通指针为智能指针.
- [ ] 完善文档.
- [x] 添加快速开始.
- [ ] 增加更多测试案例.
- [ ] 使用合适的设计模式.
## 参考:
1. 《惯性导航》秦永元
2. 《捷联惯性导航技术(第2版 译本)》译者:张天光/王秀萍/王丽霞 作者:DavidH.Titte
3. [An efficient orientation filter for inertial and
inertial/magnetic sensor arrays](http://x-io.co.uk/res/doc/madgwick_internal_report.pdf)
4. [Estimation of IMU and MARG orientation using a gradient descent algorithm](http://vigir.missouri.edu/~gdesouza/Research/Conference_CDs/RehabWeekZ%C3%BCrich/icorr/papers/Madgwick_Estimation%20of%20IMU%20and%20MARG%20orientation%20using%20a%20gradient%20descent%20algorithm_ICORR2011.pdf)
5. [Direction Cosine Matrix IMU Theory](https://www.researchgate.net/publication/265755808_Direction_Cosine_Matrix_IMU_Theory)
6. [METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS](http://www2.imm.dtu.dk/pubdb/views/edoc_download.php/3215/pdf/imm3215.pdf)
7. [A Calibration Algorithm for Microelectromechanical Systems Accelerometers in Inertial Navigation Sensors](https://arxiv.org/pdf/1309.5075.pdf)
8. [A Calibration Method of Three-axis Magnetic Sensor Based on Ellipsoid Fitting](https://www.researchgate.net/publication/273845104_A_Calibration_Method_of_Three-axis_Magnetic_Sensor_Based_on_Ellipsoid_Fitting)
9. [Accuracy Improvement of Low Cost INS/GPS for Land Applications](https://prism.ucalgary.ca/bitstream/handle/1880/41142/2001_Shin.pdf?sequence=1)
10. [Trajectory preprocessing: Computing with Spatial Trajectories](https://books.google.com.hk/books?hl=zh-CN&lr=&id=JShQJF23xBgC&oi=fnd&pg=PR3&dq=Trajectory+preprocessing.+Computing+with+Spatial+Trajectories&ots=6NUeew5i9_&sig=o7XM_QcuUnmOv5KNeezTN4H8PMw&redir_esc=y&hl=zh-CN&sourceid=cndr#v=onepage&q=Trajectory%20preprocessing.%20Computing%20with%20Spatial%20Trajectories&f=false)
## 快速开始
确保安装了gcc和cmake, 下载本项目到你的项目下
```
git clone https://github.com/yyccR/Location.git
```
在项目根目录下新建`CMakeLists.txt`, 同时添加如下:
```
include_directories(${PROJECT_SOURCE_DIR}/Location/include/eigen3)
include_directories(${PROJECT_SOURCE_DIR}/Location/math)
add_subdirectory(Location/math)
include_directories(${PROJECT_SOURCE_DIR}/Location/models)
add_subdirectory(Location/models)
include_directories(${PROJECT_SOURCE_DIR}/Location/location)
add_subdirectory(Location/location)
include_directories(${PROJECT_SOURCE_DIR}/Location/sensor)
add_subdirectory(Location/sensor)
include_directories(${PROJECT_SOURCE_DIR}/Location/system)
add_subdirectory(Location/system)
target_link_libraries(${PROJECT_NAME} Location_math)
target_link_libraries(${PROJECT_NAME} Location_models)
target_link_libraries(${PROJECT_NAME} Location_location)
target_link_libraries(${PROJECT_NAME} Location_sensor)
target_link_libraries(${PROJECT_NAME} Location_system)
target_link_libraries(${PROJECT_NAME} Location_test)
```
在main文件里添加如下测试代码.
```
#include
#include
#include "sensor/GPS.h"
#include "location/Location.h"
using namespace Eigen;
using namespace std;
int main() {
Location location;
Vector3d gyro_data_v(0.004263,0.019169,-0.001014);
Vector3d mag_data_v(-2.313675,-82.446960,-366.183838);
Vector3d acc_data_v(0.105081,0.108075,9.774973);
VectorXd gps_data_v(7);
gps_data_v << 114.174118,22.283789,0.0,0.0,24.0,0.0,1554348968704.665039;
Vector3d g_data_v(0.094139, 0.107857,9.808955);
Vector3d ornt_data_v(-0.549866,0.629957,-0.069398);
Vector3d road_data(1000.0, 0.0, 0);
location.PredictCurrentPosition(gyro_data_v,acc_data_v,mag_data_v,gps_data_v,g_data_v,ornt_data_v, road_data);
cout << location.GetGNSSINS().lng << " " << location.GetGNSSINS().lat << endl;
return 0;
}
```
如果输出 `114.174 22.2838` 表示已经成功内嵌了本项目.
## 数据格式.
- 陀螺仪(x, y, z), 单位 rad/s
- 加速计(x, y, z), 单位 m/s²
- 地磁计(x, y, z), 单位 μt
- 重力感应器(x, y, z), 单位 m/s²
- 方向传感器(roll, pitch, yaw), 单位 角度(degree)
手机并没有方向传感器, 这个所谓的传感器数据是手机底层算法计算得到的。
- 指南针(degree), 单位 角度(degree)
- 道路信息(距离下个路口距离, 当前位置道路方向, 道路类型编码)
如果拿不到道路数据, 则全部填0即可, `(0.0, 0.0, 0.0)`
- GPS(lng, lat, alt, accuracy, speed, bearing, t)
- lng, 经度, double
- lat, 纬度, double
- alt, 海拔, double
- accuracy, 精度, double
- speed, 速度, double
- bearing, 方向, double, 单位 角度(degree)
- t, 时间戳, 单位 毫秒(millisecond)
## 更加详细的调用细节
详见 docs/apiCallDetails.md
## TODO
- [X] CMakeLists 优化.
- [ ] 清理垃圾代码.
- [ ] 模板化.
- [ ] 替换普通指针为智能指针.
- [ ] 完善文档.
- [x] 添加快速开始.
- [ ] 增加更多测试案例.
- [ ] 使用合适的设计模式.
## 参考:
1. 《惯性导航》秦永元
2. 《捷联惯性导航技术(第2版 译本)》译者:张天光/王秀萍/王丽霞 作者:DavidH.Titte
3. [An efficient orientation filter for inertial and
inertial/magnetic sensor arrays](http://x-io.co.uk/res/doc/madgwick_internal_report.pdf)
4. [Estimation of IMU and MARG orientation using a gradient descent algorithm](http://vigir.missouri.edu/~gdesouza/Research/Conference_CDs/RehabWeekZ%C3%BCrich/icorr/papers/Madgwick_Estimation%20of%20IMU%20and%20MARG%20orientation%20using%20a%20gradient%20descent%20algorithm_ICORR2011.pdf)
5. [Direction Cosine Matrix IMU Theory](https://www.researchgate.net/publication/265755808_Direction_Cosine_Matrix_IMU_Theory)
6. [METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS](http://www2.imm.dtu.dk/pubdb/views/edoc_download.php/3215/pdf/imm3215.pdf)
7. [A Calibration Algorithm for Microelectromechanical Systems Accelerometers in Inertial Navigation Sensors](https://arxiv.org/pdf/1309.5075.pdf)
8. [A Calibration Method of Three-axis Magnetic Sensor Based on Ellipsoid Fitting](https://www.researchgate.net/publication/273845104_A_Calibration_Method_of_Three-axis_Magnetic_Sensor_Based_on_Ellipsoid_Fitting)
9. [Accuracy Improvement of Low Cost INS/GPS for Land Applications](https://prism.ucalgary.ca/bitstream/handle/1880/41142/2001_Shin.pdf?sequence=1)
10. [Trajectory preprocessing: Computing with Spatial Trajectories](https://books.google.com.hk/books?hl=zh-CN&lr=&id=JShQJF23xBgC&oi=fnd&pg=PR3&dq=Trajectory+preprocessing.+Computing+with+Spatial+Trajectories&ots=6NUeew5i9_&sig=o7XM_QcuUnmOv5KNeezTN4H8PMw&redir_esc=y&hl=zh-CN&sourceid=cndr#v=onepage&q=Trajectory%20preprocessing.%20Computing%20with%20Spatial%20Trajectories&f=false)