# wit_imu_ros2
**Repository Path**: liang-hongpeng/wit_imu_ros2
## Basic Information
- **Project Name**: wit_imu_ros2
- **Description**: wit imu modbus ROS2驱动包
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 2
- **Forks**: 2
- **Created**: 2023-05-13
- **Last Updated**: 2025-05-08
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# 1.ROS环境安装
(如果已经安装好ROS运行环境,可以跳过本章,直接进入第二章IMU软件包使用)
Robot Operating System (ROS) 是一个得到广泛应用机器人系统的软件框架,它包含了一系列的软件库和工具用于构建机器人应用。从驱动到最先进的算法,以及强大的开发者工具,ROS 包含了开发一个机器人项目所需要的所有东西。且它们都是开源的。
ROS 虽然名为机器人操作系统,但它与我们一般概念中的操作系统,如 Windows,Linux,iOS 和 Android 这些。Windows,Linux,iOS 和 Android 这些操作系统为我们管理计算机的物理硬件资源,如 CPU、内存、磁盘、网络及外设,提供如进程、线程和文件这样的抽象,并提供如读文件、写文件、创建进程、创建线程及启动线程这样的操作。ROS 所工作的层级并没有这么低,它基于一般概念中的操作系统来运行,官方推荐基于 Ubuntu Linux 运行,并在 Ubuntu Linux 操作系统提供的抽象和操作的基础之上,提供了更高层的抽象,如节点、服务、消息、主题等,以及更高层的操作,如主题的发布、主题的订阅、服务的查询与连接等操作。同时 ROS 还提供开发机器人项目所需的工具和功能库。
ROS 发行版是一个版本标识的 ROS 包集合,这些与 Linux 发行版(如 Ubuntu)类似。ROS 发行版的目的是让开发者可以基于一个相对稳定的代码库来工作,直到他们可以平稳地向前演进。一旦发行版发布,官方就会限制对其的改动,而仅仅提供对于核心包的 bug fixes 和非破坏性的增强。
当前(2018-01-28) ROS 系统已经发布了多个版本。ROS 最新的一些版本如下:
{{{width="auto" height="auto"}}}
ROS 基本上保持每年一个新版本,每两年一个长期发行版的发布节奏。关于 ROS 版本发布的更多内容,如更多的发行版的介绍,发布的计划等,可以参考 ROS 官方站点的 Distributions 主页。
目前官方推荐使用最近的一个长期支持版本,即 ROS Kinetic Kame,求新的同时兼顾稳定性无疑应该采用这一版本,如果想要尝试最新的功能特性则可以使用最新的发行版 ROS Lunar Loggerhead。
ROS 的安装步骤如下:
ROS kinetic官网:[http://wiki.ros.org/kinetic/Installation/Ubuntu](http://)
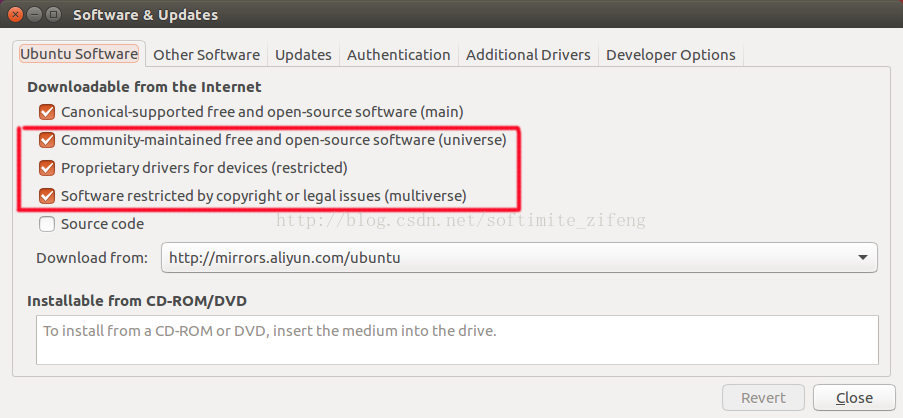
## 1.1 配置资源库
"restricted","universe"和"multiverse"。一般情况是不用配置的,参考下图红色框部分。如果没有配置,可以参考Ubuntu官网。
{{{width="auto" height="auto"}}}
## 1.2 安装
1.设置安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.设置key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3.安装
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
独立的包安装:可以安装一个特定的 ROS 包(用实际的包名来替换下面的命令中的 “PACKAGE”)。
sudo apt-get install ros-kinetic-PACKAGE
如:sudo apt-get install ros-kinetic-slam-gmapping
要找到可用的包,可以使用:apt-cache search ros-kinetic
## 1.3 初始化
```
sudo rosdep init (安装一次后只能运行一次,若重新安装选择跳过或卸载)
rosdep update结果:
Add distro "groovy"
Add distro "hydro"
Add distro "indigo"
Add distro "jade"
Add distro "kinetic"
Add distro "lunar"
Add distro "melodic"
updated cache in /home/ubuntu1604/.ros/rosdep/sources.cache
```
若出现time out 或错误,重试几遍
## 1.4 配置环境变量
``` C
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc打开另一个终端:
source ~/.bashrc
```
如果安装了多个 ROS 发行版,则 ~/.bashrc 必须只 source 当前正在使用的那一版的 setup.bash。
如果你只想要修改当前 shell 的环境,则输入如下的命令来替换上面的命令:source /opt/ros/kinetic/setup.bash
## 1.5 安装rosinstall
sudo apt-get install python-rosinstall
构建包所需的依赖
到这一步,应该已经安装好了运行核心 ROS 包的所有东西。要创建和管理你自己的 ROS workspace,还有单独发布的许多的工具。比如,rosinstall 是一个常用的命令行工具,使你可以通过一个命令为 ROS 包简单地下载许多源码树。
要安装这个工具及其它的依赖以构建 ROS 包,则运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
完成完整的 ROS 安装之后,可以对安装做一个简单的测试。可以通过 roscore 和 turtlesim 来做测试。
## 1.6 测试
```
1) 打开Termial,输入以下命令,初始化ROS环境:
roscore
2) 打开新的Termial,输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
3) 打开新的Termial,输入以下命令,可以在Termial中通过方向键控制小乌龟的移动:
rosrun turtlesim turtle_teleop_key
```
# 2.IMU软件包使用
## 2.1 安装 ROS IMU 依赖
请在终端运行对应的命令
如果你使用的是 ubuntu 16.04,ROS kinetic,python2 :
```
sudo apt-get install ros-kinetic-imu-tools ros-kinetic-rviz-imu-plugin
sudo apt-get install python-visual
```
如果你使用的是 ubuntu 18.04,ROS Melodic,python2 :
```
sudo apt-get install ros-melodic-imu-tools ros-melodic-rviz-imu-plugin
```
如果你使用的是 ubuntu 20.04,ROS Noetic,python3 :
```
sudo apt-get install ros-noetic-imu-tools ros-noetic-rviz-imu-plugin
pip3 install pyserial
```
## 2.2 建立工作空间
下载示例程序,将文件放到home根目录,右击提取到此处。
打开命令终端,运行下面指令:
```
cd ~/wit/wit_ros_ws/
catkin_make
cd ~/wit/wit_ros_ws/src/scripts/
sudo chmod 777 *.py
echo "source ~/wit/wit_ros_ws/devel/setup.sh" >> ~/.bashrc
source ~/.bashrc
```
## 2.3 ROS 驱动和可视化
以 ubuntu16.04,JY901S,python2.7 为例
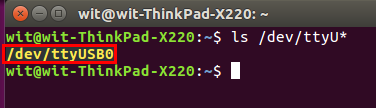
1. 查看USB端口号。先不要插 IMU 的 USB ,在终端输入 `ls /dev/ttyUSB*` 来检测一下,然后在将 USB 插入电脑,再在终端输入 `ls /dev/ttyUSB*` 来检测一下,多出来的 ttyUSB 设备就是 IMU 的串口。
{{{width="auto" height="auto"}}}
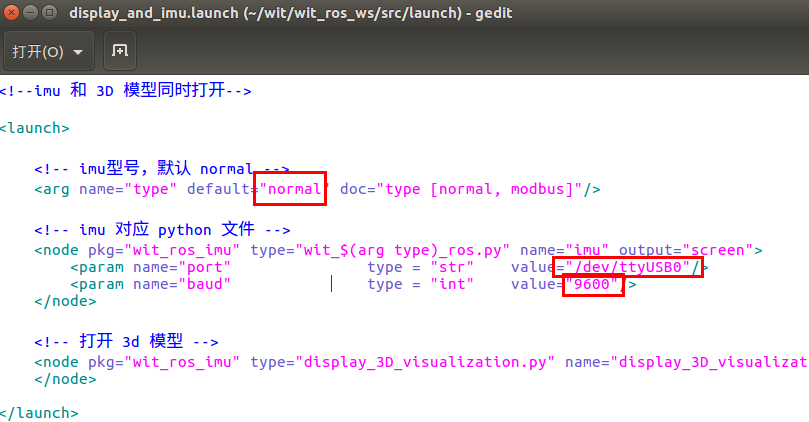
2. 修改参数配置。需要修改的参数包括设备类型,USB端口号和波特率。进入脚本目录~/wit/wit_ros_imu/src/launch,修改对应的 launch 文件中的配置参数。设备类型如果是modbus协议的就填modbus,使用wit标准协议的填normal,如果是MODBUS高精度协议的填hmodbus,如果是CAN协议的就填can,如果是CAN高精度协议的填hcan。设备号/dev/ttyUSB0(脚本默认用的 /dev/ttyUSB0)为你电脑识别出来的数字。波特率根据实际使用设定,JY6x系列模块默认波特率为115200,CAN模块为230400,其他模块为9600,如果用户通过上位机修改了波特率,需要对应修改成修改后的波特率。
{{{width="auto" height="auto"}}}
3. 给对应的串口管理员权限,在终端输入: sudo chmod 777 /dev/ttyUSB0,提示你输入管理员密码,输入密码后回车即可。注意每次重新插入USB口都需要重新给串口赋管理员权限。
4. 如果使用的产品是Modbus协议的,还需要安装一下Modbus的依赖库,在终端输入:pip install modbus_tk
5. 打开终端,运行launch文件
```
roslaunch wit_ros_imu display_and_imu.launch
```
{{{width="auto" height="auto"}}}
打开两个新终端输入分别输入下面几行命令
```
rostopic echo /wit/imu
rostopic echo /wit/mag
rostopic echo /wit/location #经纬度解析只有WIT私有协议 即normal才有
```
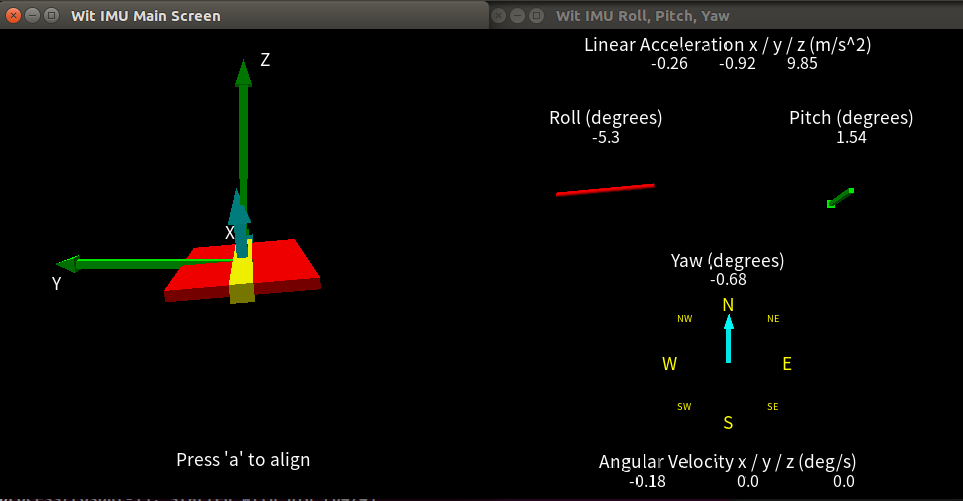
如下图,驱动运行成功后和 `rostop echo` 输出的信息
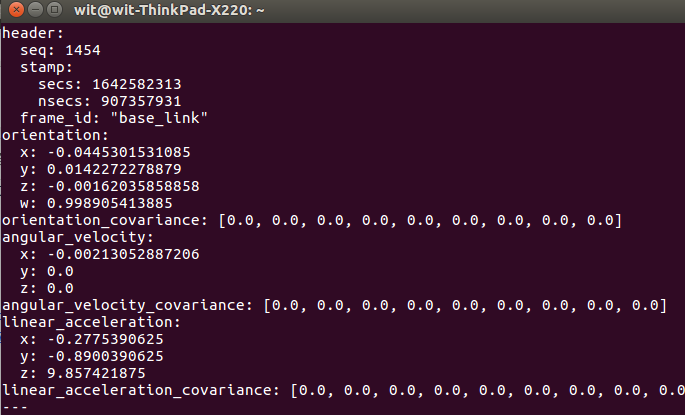{{{width="auto" height="auto"}}}
6. 同理,如需要运行其他 launch 文件,需要先确保 launch 文件中的 /dev/ttyUSB0 设备修改对。
7. 相关文件说明
* display_and_imu.launch,打开打开 IMU 驱动节点和用 visual 编写的可视化模型。(仅支持 ubuntu 16.04)
* wit_imu.launch,打开用 IMU 驱动节点。
* rviz_and_imu.launch,打开 IMU 驱动节点和 Rviz 可视化。
# 3. 串口助手测试通讯
以 ubuntu16.04 为例,波特率 9600
1. 安装 cutecom(你也可以安装其他的串口助手进行调试)。
```
apt-get install cutecom -y
```
2. 插入串口模块,需要通过命令ls /dev/ttyU*查看新加入的串口模块的端口号,然后对其赋予读写权限,以/dev/ttyUSB0为例,输入指令:sudo chmod 777 /dev/ttyUSB0,然后根据提示输入管理员密码。注意每次新插入USB模块都需要重新赋读写权限。
3. 安装成功后在终端输入 cutecom,打开串口助手,然后进行一些设置,注意从下拉框中选择的串口号是不对的,需要根据上面第二步中获取到的串口号进行修改,比如/dev/ttyUSB0,如图中所示。
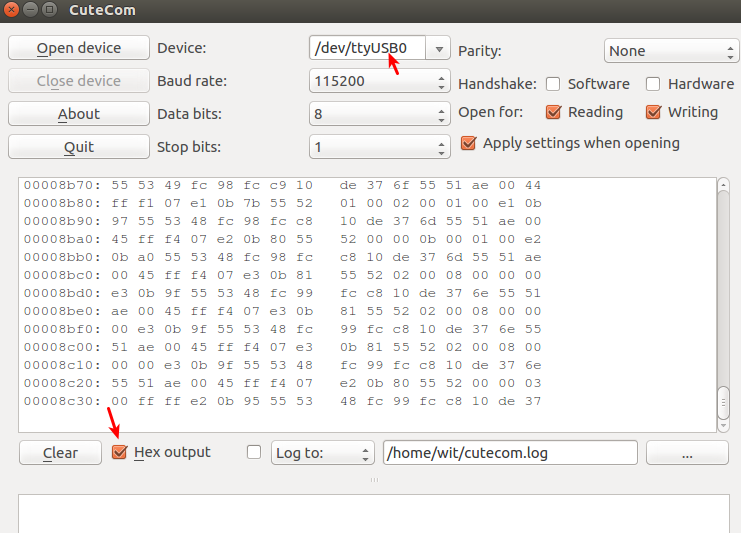{{{width="auto" height="auto"}}}
4. 然后我们点击`open device` ,此时下面的空白面板会有 imu 的数据打印。
5. 我们可以等待 imu 的数据打印一会儿,然后点击 `close device`来查看。
6. 如果可以找到`55 51`、 `55 52`、 `55 53`开头的信息,那么模块发送的数据是没有问题的,如果有数据但没有找到正确包头的数据,则需要核对一下波特率设置,切换到正确的波特率就可以显示了。
# 4. ROS2使用方法
1. 新建ROS2功能包。
```
ros2 pkg create wit_ros --build-type ament_python --dependencies rclpy
```
2. 添加*CMakeLists.txt*文件。使用ROS时,需要打开wit_ros源码根目录下的*CMakeLists.txt*文件,将文件顶板的变量**COMPILE_METHOD**改为**COLCON**,
```cmake
#=======================================
# Compile setup (ORIGINAL,CATKIN,COLCON)
#=======================================
set(COMPILE_METHOD COLCON)
3. 添加*package.xml*文件。把*package.xml*文件备份,命名为*package_ros1.xml*。
4. 添加rviz_and_imu.launch.py文件。
5. 修改*setup.py*文件。
6. 安装 ROS2 IMU 依赖
使用的是 ubuntu 22.04,ROS2 Humble,python3 :
```
sudo apt-get install ros-humble-imu-tools ros-humble-rviz-imu-plugin
pip3 install pyserial
```
6. 安装其他依赖
7. 在wit_ros目录下编写wit_modbus_ros2.py。
8. 运行示例
终端切换到imu_ros_ws目录下,执行:
```
source install/setup.bash
ros2 launch wit_ros rviz_and_imu_ros2.launch.py
```
rviz中可以看到如下图所示:
图1 Rviz中查看IMU
