# CalibCamera
**Repository Path**: sungq5/CalibCamera
## Basic Information
- **Project Name**: CalibCamera
- **Description**: No description available
- **Primary Language**: C++
- **License**: MIT
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 1
- **Forks**: 0
- **Created**: 2024-11-19
- **Last Updated**: 2024-11-19
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# 单目相机标定方法从理论到实践
> 帮助文档:
>
> 1. [单目相机成像原理.pdf](https://github.com/SHU-FLYMAN/CalibCamera/blob/master/docs/01%20%E7%90%86%E8%AE%BA%E9%83%A8%E5%88%86%EF%BC%9A%E5%8D%95%E7%9B%AE%E6%88%90%E5%83%8F%E8%BF%87%E7%A8%8B.pdf)
> 2. [程序帮助文档.pdf](https://github.com/SHU-FLYMAN/CalibCamera/blob/master/docs/02%20%E5%AE%9E%E8%B7%B5%E9%83%A8%E5%88%86%EF%BC%9A%E5%BC%A0%E6%AD%A3%E5%8F%8B%E6%A0%87%E5%AE%9A%E6%B3%95%20-%20OpenCV%E5%AE%9E%E7%8E%B0.pdf)
>
> 同样提供 `md` 文件,在 `doc` 文件夹中,可以下载下来,用Typora打开即可,
单目相机的标定是所有三维重建算法的基础,所以,大致明白单目相机的成像原理,以及基于OpenCV的标定流程,对于我们后序深入地学习三维重建算法至关重要。
相机标定的具体原理比较复杂,但好在OpenCV很多过程都帮我们封装好了,基于张正友标定发的单目相机标定具体步骤如下:
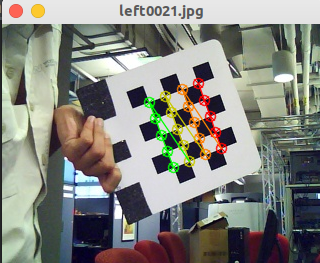
1. 准备标定图片(不同位置、角度、姿态下拍摄,至少需要3张,以10~20张为宜)
2. 对每一张标定图片,提取角点信息,并进行亚像素角点优化(绘制相应图像)
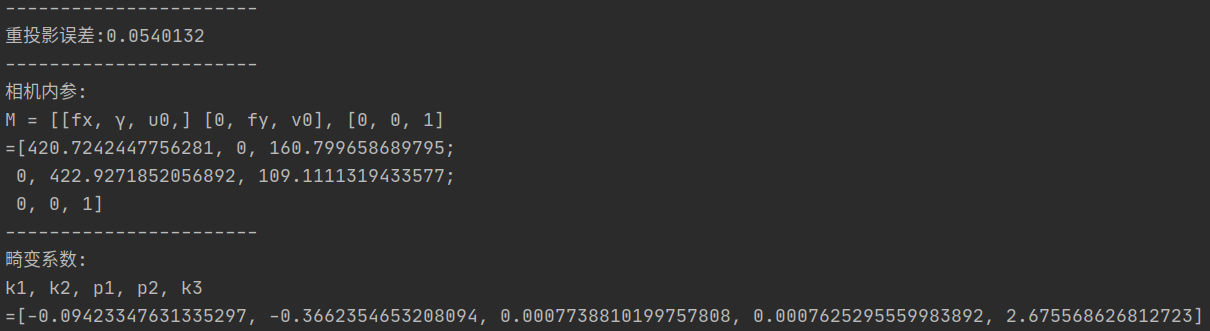
3. 调用张正友标定方法,对相机进标定,也就是计算内参和畸变系数
4. 对标定结果进行评价(重投影误差)
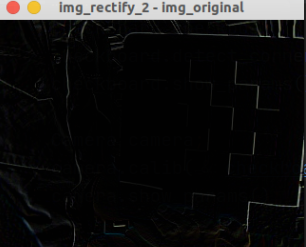
5. 利用标定结果(内参、畸变系数),对任何输入的图像进行矫正
相信在明白了理论之后,阅读我们的代码应该非常容易:尽量命名做到望文知义、封装做到了面对对象、增加了额外注释。
## 使用方法
1. [OpenCV安装与配置](https://www.cnblogs.com/huang-y-x/p/11635126.html)(尽量不需要选择特别新的OpenCV版本,很难编译通过)
2. [Clion安装与配置](https://www.cnblogs.com/FLYMANJB/p/13339001.html)(Ubuntu是相类似的)
3. 修改相应的配置路径
- `CMakeList.txt`,主要是OpenCV包的路径
- `main.cpp`,里面标定图片文件夹路径,以及测试图片路径
之后点击运行即可(reload cmake project),当然你也可以用Visual studio来运行,因为是Cmake来管理环境变量的,所以迁移较为方便。代码已经在Windows、Ubuntu18.04下测试,能够运行。
 ## 基础知识(简要回顾)
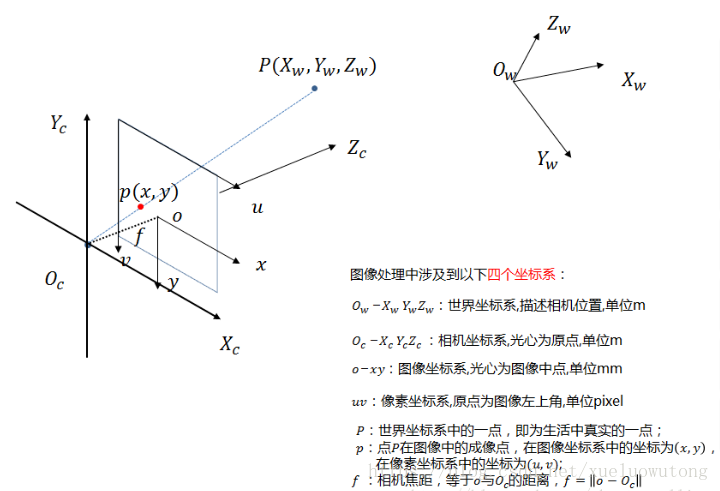
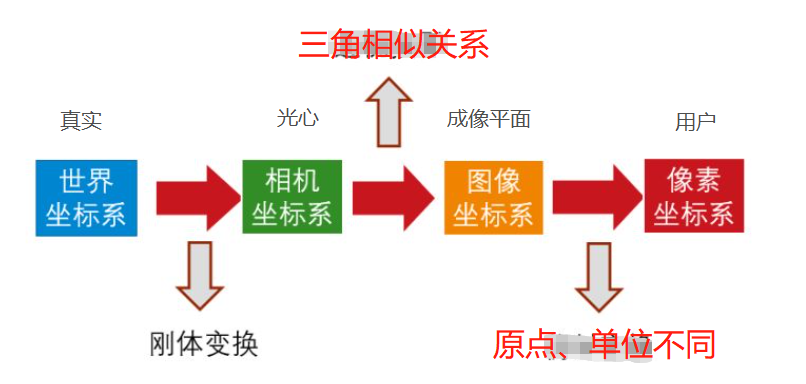
简要的原理回顾如下:相机模型如下,主要包含四个坐标系:
## 基础知识(简要回顾)
简要的原理回顾如下:相机模型如下,主要包含四个坐标系:
 四个坐标系的转换关系如下:
四个坐标系的转换关系如下:
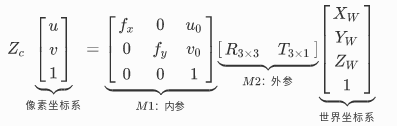
 而我们主要关心的是从世界坐标系到像素坐标系的变换,它们的公式如下:
而我们主要关心的是从世界坐标系到像素坐标系的变换,它们的公式如下:
 而相机成像过程中存在着径向畸变和切向畸变,合并后:
而相机成像过程中存在着径向畸变和切向畸变,合并后:
 为了之后三维重建算法的精确性,我们必须对这些畸变进行矫正。我们可以通过张正友标定法得到相机的**畸变系数**,除此之外还有它的**内参**。获得了这两个参数,我们就能对相机的整个成像过程建立较为准确的映射关系(至少是单向的)。
## 感谢
标定用的图片搜集自互联网,感谢原作者!邮箱:fly_cjb@163.com,有问题欢迎提问!
为了之后三维重建算法的精确性,我们必须对这些畸变进行矫正。我们可以通过张正友标定法得到相机的**畸变系数**,除此之外还有它的**内参**。获得了这两个参数,我们就能对相机的整个成像过程建立较为准确的映射关系(至少是单向的)。
## 感谢
标定用的图片搜集自互联网,感谢原作者!邮箱:fly_cjb@163.com,有问题欢迎提问!