# PPP-BayesTree
**Repository Path**: whigg/PPP-BayesTree
## Basic Information
- **Project Name**: PPP-BayesTree
- **Description**: Code release for "Evaluation of Precise Point Positioning Convergence with an Incremental Graph Optimizer".
- **Primary Language**: C++
- **License**: MIT
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2021-03-04
- **Last Updated**: 2021-03-04
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# PPP-BayesTree
This repository contains a modified version of [GTSAM](https://bitbucket.org/gtborg/gtsam), which has been updated for GNSS data processing. To enable RINEX file reading and GNSS observation modeling, the [GPSTk](http://www.gpstk.org/bin/view/Documentation/WebHome) library is utilized. A detailed description of the modification made can be found in ["Evaluation of Kinematic Precise Point Positioning Convergence with an Incremental Graph Optimizer"](https://www.researchgate.net/publication/324454778_Evaluation_of_Kinematic_Precise_Point_Positioning_Convergence_with_an_Incremental_Graph_Optimizer). This software has been cleared for public release by the USAF Case # 88ABW-2018-0905
If you utilze this software for an academic purpose, please consider using the following citation:
```
@inproceedings{ watson2018evaluation,
title={Evaluation of kinematic precise point positioning convergence with an incremental graph optimizer},
author={Watson, Ryan M and Gross, Jason N},
booktitle={2018 IEEE/ION Position, Location and Navigation Symposium (PLANS)},
pages={589--596},
year={2018},
organization={IEEE}
}
```
## How to Install
### 1) Requirements/Recommendations
#### Required
* Boost --> ```` sudo apt-get install libboost-all-dev ````
* CMake --> ```` sudo apt-get install cmake ````
#### Recommended
* Intel TBB --> ```` sudo apt-get install libtbb-dev ````
* [Intel MKL](https://software.intel.com/en-us/mkl)
### 2) Clone repository to local machine
* PPP-BayesTree --> ```` git clone https://github.com/wvu-navLab/PPP-BayesTree.git ````
### 3) Build
````bash
cd PPP-BayesTree/truck/gtsam;
mkdir build && cd build;
cmake --CMAKE_BUILD_TYPE Release ..
make
````
### 4) Test
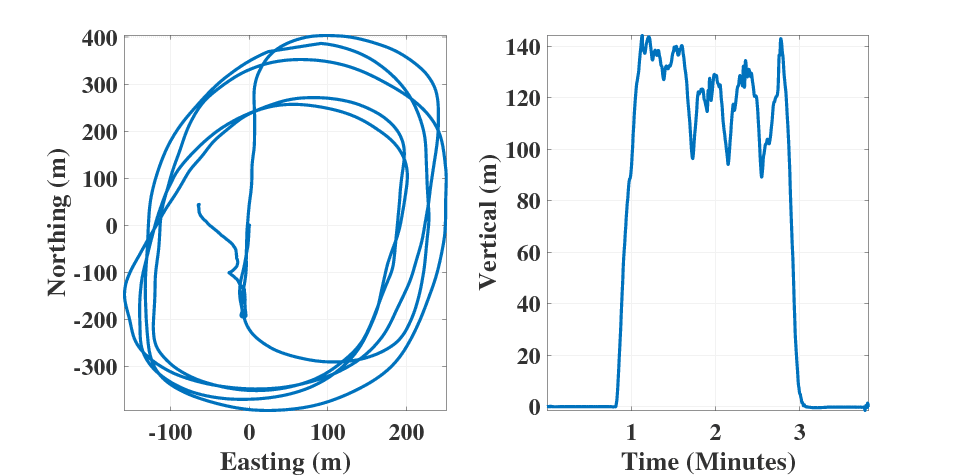
As an example, a sample data-set is provided. This data-set was collected at West Virginia University on-board a small, fixed-wing UAV --- this platform is known as the [Phastball](https://www.researchgate.net/publication/312112578_Characterization_of_Multi-Antenna_GNSS_Multi-Sensor_Attitude_Determination_for_Stratospheric_Balloon_Platforms/figures?lo=1&utm_source=google&utm_medium=organic). The two images below, we provide an in-flight image from the Phastball, and the flight profile.

Using the provided data-set, the PPP Bayes tree example can be utilized as shown below.
````bash
cd ../data
./../build/examples/pppBayesTree -c phastball.conf
````