# clion_carto_ws
**Repository Path**: xiaojake/clion_carto_ws
## Basic Information
- **Project Name**: clion_carto_ws
- **Description**: 用CLion+Cmake同时管理cartographer和cartographer_ros,实现对carto的编译、debug单步调试
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2022-05-17
- **Last Updated**: 2025-02-24
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# 第一篇:clion_carto_ws工作空间搭建方法
[TOC]
> 工欲善其事必先利其器!
## 0. 引言
### 0.1 这篇文章是想解决什么问题?
cartographer(以下简称carto)的代码因为有严谨的架构设计,代码量大,文件多,质量高,用到了许多c++的语法知识和技巧,要想掌握好carto的代码变得不是那么容易。
对于新人,还有一个造成我们carto代码阅读感觉非常吃力的原因就是:没有一种”用IDE来对cartographer和cartographer_ros两个工作目录**同时进行管理、编译、debug单步调试**“的方法。
这就导致了一个严重的问题:**无法在cartographer和cartographer_ros的代码之间方便又准确地进行代码跳转**,也失去了对于现代开发者而言用IDE开发的巨大效率提升优势。进一步导致我们**很难去梳理清楚carto整个的代码逻辑**,只有经验丰富的开发人员才可能会比较清楚地阅读代码。但,我相信他们在没有借助IDE来看carto代码的过程也是很难受的。
因为这个,有很长一段时间我都提不起劲去仔细阅读研究carto的每一行代码(我们为自己的懒惰找借口的时候,总是最勤快的,哈哈)
为解决这个问题,我曾经费了不少功夫,尝试过很多方法:
1)完成对carto工作空间在终端里用命令行编译后,用vscode来直接打开。我相信这应该是大家用得最多的办法。
**优点:**
- 可以同时管理cartographer和cartographer_ros的代码;
- 打开迅速;
- 具有部分IDE的功能;
- 有丰富的插件生态。
**缺点:**
- 会有很多头文件报错,即使配置了头文件准确路径也还是会报错;
- 无法实现代码的准确跳转,有时直接跳不过去,有时会列出很多的可能,不方便;
- 无法直接进行代码编译、debug单步调试;
2)ROS Qt Creator,KDevelope也尝试过,算是走过的弯路,就不讲了。
3)使用c++开发专门的IDE:clion
> clion是什么?我相信搞Java开发的朋友应该都知道 IntelliJ IDEA 吧,没错,他俩是一个妈生的,而且还是双胞胎。
**优点:**
- 这是一个很强大的IDE,有许多提升开发者效率的功能,颜值高,背后是强大的JetBrains团队在进行开发维护。
**缺点:**
- 只能对一个工作空间(含有总cmakelist.txt)进行管理。就是说,你可以用clion单独管理和编译cartographer工程或cartographer_ros工程,这样就不是那么方便了。
折腾这么久,可算是让我找到了最终解!今天就是要把它分享给大家。该方法的**核心思想**就是:**通过cmake来组织**cartographer和cartographer_ros两个工程,即:实现了**用一个额外的总CMakeLists.txt来统一管理cartographer和cartographer_ros**,这样clion也就可以同时管理两者,从而解决了方法3)的缺点。从此**carto代码的阅读效率直线拉升!**
我录了一个我们常用的查看定义的效果视频,让大家先爽一下:
以查看map_builder怎么被创建为例。你可以看到已经能够一路从 cartographer_ros代码 跳转到 cartographer 代码里了。
### 0.2 一点特别说明
该方法的核心思想不是我第一个想到的,也是在我偶然间看到github上有人做了这个事情,仓库名叫做
cartographer_superbuild :https://github.com/larics/cartographer_superbuild
没有大问题,有3个小点不太好:
- 步骤描述得相对简单,缺少一些图片描述,对于不熟悉carto和clion的人显得不太友好;
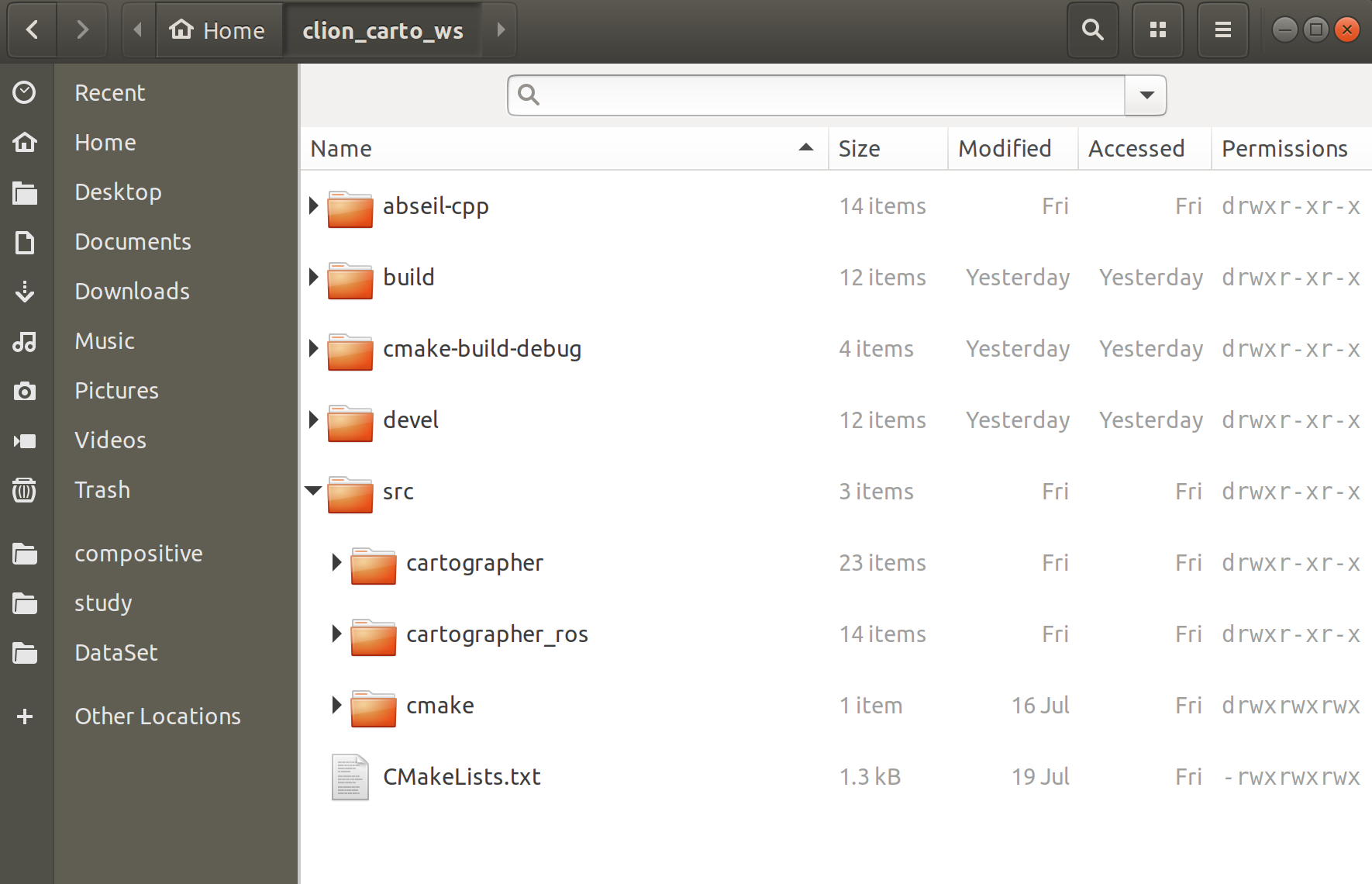
- 该仓库的文件组织方式我不太喜欢:没有src目录,devel放在了build里。我还是习惯了有一个单独的总src目录,build和devel分开的方式,就像我们平时开发ros工程里的那样,所以我进行了一些修改。最终呈现的效果图如下:
 - 除此之外,这位原作者只提供了用cmke命令行在终端里编译的方法。
我会仔细描述在clion中如何配置,进而可以使用clion来对工作空间进行管理、编译、debug,更易用。
喜欢在终端里用命令行编译的同学,我还**会提供一种配合ninja编译**的方法,这样你的**编译速度会更快**!(理论上clion上应该也是可以配置用cmake+ninja的,我还没摸索出来,如果有这方面经验的同学欢迎补充啊,感激不尽!)
同时,你还会发现有一个好处:就是**当修改了lua、launch、rviz画面布局后,都可以直接生效**,不需要再次编译carto代码才能生效了。效率又提高了一丢丢。
> 这里特别小讲一下,也是我去了解cmake,catkin_make后分析出的。
>
> 如果你还是catkin_make_isolated的编译方式,那么不要按照carto官方的编译命令,要去掉--install,即:
>
> ```
> catkin_make_isolated --use-ninja
> source devel_isolated/setup.bash
> ```
>
> 也可以达到同样的效果!
>
---
**好了,正式开始搞事情吧!**
我是以 **Ubuntu 18.04 + ROS Melodic + CLion 2019.3.6** 为例的,我也推荐这种组合。ubuntu 16有点老了,在今年就会停止更新维护。
## 1. 下载管理代码
```
#进入root
sudo su
#给hosts文件最后加上 185.199.108.133 raw.githubusercontent.com
#这样之后你下载github仓库代码的速度会提升很大,以后下载carto,abseil代码,安装ros或者以后其它工程的时候遇到的问题也会少很多
echo "185.199.108.133 raw.githubusercontent.com" >> /etc/hosts
#退出root
exit
#我的这个仓库直接是一个工作空间,所以可以直接在你的~目录下运行即可,不需要你手动新建工作空间,不需要进入你的src目录
git clone https://github.com/XiaoJake/clion_carto_ws.git
```
## 2. 加载cartographer和cartographer_ros
- **方式1:用网络下载官方最新原版carto代码:**
```
cd ~/clion_carto_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
```
- **方式2:在src目录中直接放入自己的carto代码:**
如果你有自己在注释、优化的carto代码,你可以直接把你的cartographer和cartographer_ros放入~/clion_carto_ws/src目录中即可
## 3. 代码环境安装
### 3.1 ROS Melodic 安装
roswiki官方文档就是最好的:
http://wiki.ros.org/melodic/Installation/Ubuntu
其中讲到的这句命令希望你一定运行它,这样你每次Ctrl+Alt+T新开终端就会自动加载ros环境。
```
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
```
### 3.2 cartographer环境安装
与carto官方指导文档步骤差不太多:
```
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build stow
cd ~/clion_carto_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
sudo apt-get remove ros-${ROS_DISTRO}-abseil-cpp
src/cartographer/scripts/install_abseil.sh
```
> **注意:**
>
> 如果你是ubuntu16.04还需要额外运行下面的命令:这是由于Ubuntu 16及以下系统自带的protobuf版本小于3.0,所以需要运行下面这句代码来源码安装3.4版本的protobuf。ubuntu18.04系统就可以直接略过
>
> ```
> src/cartographer/scripts/install_proto3.sh
> ```
>
> 这里还有个坑爹的地方需要注意!运行上面这句命令后,会在src同级目录下多出一个protobuf目录,在上面的命令运行成功后,要把这个protobuf目录删除!不然,你后面编译carto代码会有proto相关的报错!这个真是非常非常坑,我折腾了好久才发现是这里的问题。。。
>
## 4. 编译&运行工程代码
- **方式1:可与clion兼容的make编译方式:**
(本文推荐这种,目前只有这种方式才可以和clion无缝联动?)
```
cd ~/clion_carto_ws/
mkdir build;cd build
cmake .. -DCATKIN_DEVEL_PREFIX=../devel
make
```
- **方式2:只在终端编译,可用ninja来实现快速编译:**
```
cd ~/clion_carto_ws/
mkdir build;cd build
cmake .. -DCATKIN_DEVEL_PREFIX=../devel -G Ninja
ninja
```
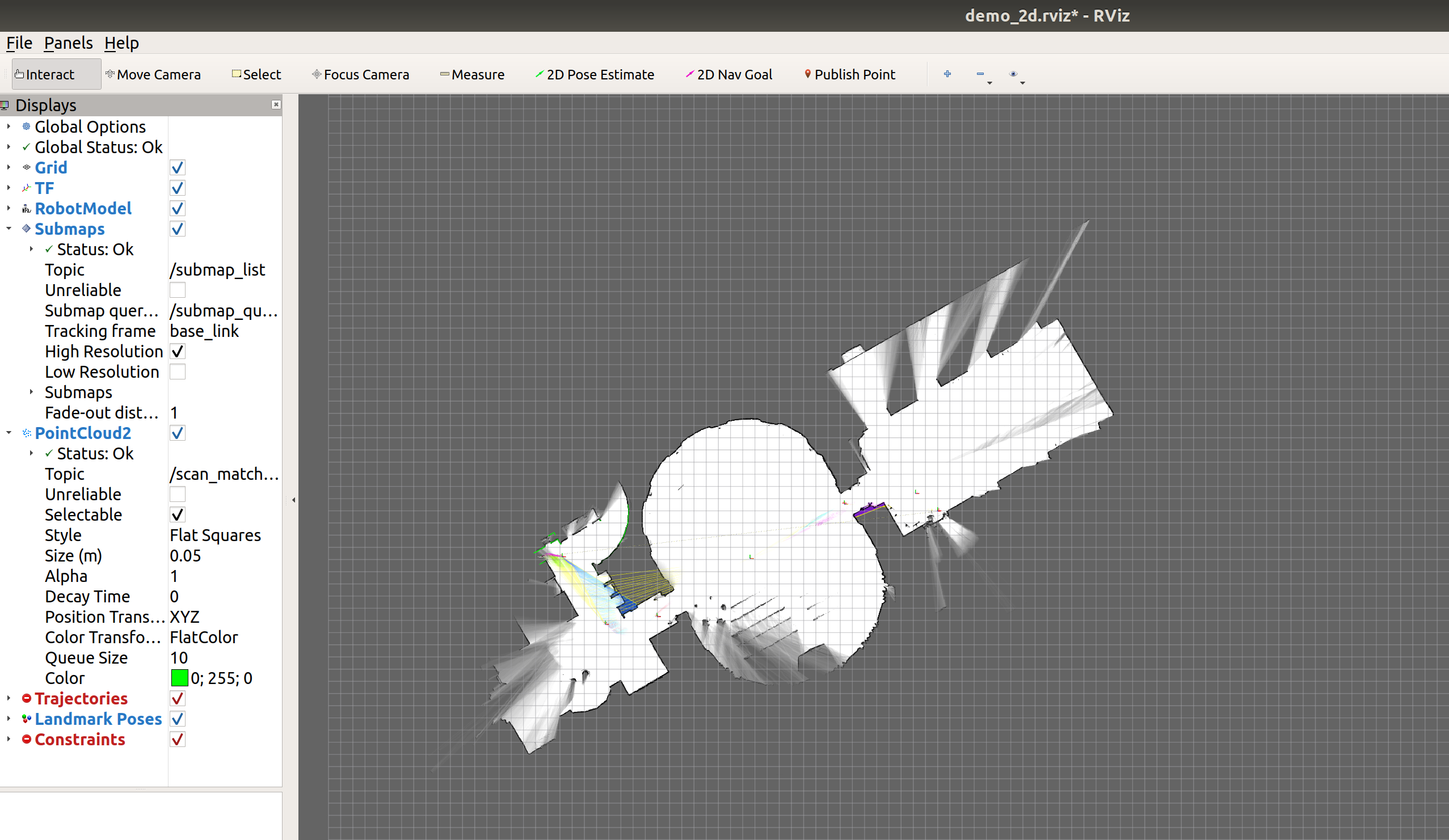
- **好了,运行一下熟悉的官方2d demo看看:**
```
cd ~/clion_carto_ws
source devel/setup.zsh
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
```
- 除此之外,这位原作者只提供了用cmke命令行在终端里编译的方法。
我会仔细描述在clion中如何配置,进而可以使用clion来对工作空间进行管理、编译、debug,更易用。
喜欢在终端里用命令行编译的同学,我还**会提供一种配合ninja编译**的方法,这样你的**编译速度会更快**!(理论上clion上应该也是可以配置用cmake+ninja的,我还没摸索出来,如果有这方面经验的同学欢迎补充啊,感激不尽!)
同时,你还会发现有一个好处:就是**当修改了lua、launch、rviz画面布局后,都可以直接生效**,不需要再次编译carto代码才能生效了。效率又提高了一丢丢。
> 这里特别小讲一下,也是我去了解cmake,catkin_make后分析出的。
>
> 如果你还是catkin_make_isolated的编译方式,那么不要按照carto官方的编译命令,要去掉--install,即:
>
> ```
> catkin_make_isolated --use-ninja
> source devel_isolated/setup.bash
> ```
>
> 也可以达到同样的效果!
>
---
**好了,正式开始搞事情吧!**
我是以 **Ubuntu 18.04 + ROS Melodic + CLion 2019.3.6** 为例的,我也推荐这种组合。ubuntu 16有点老了,在今年就会停止更新维护。
## 1. 下载管理代码
```
#进入root
sudo su
#给hosts文件最后加上 185.199.108.133 raw.githubusercontent.com
#这样之后你下载github仓库代码的速度会提升很大,以后下载carto,abseil代码,安装ros或者以后其它工程的时候遇到的问题也会少很多
echo "185.199.108.133 raw.githubusercontent.com" >> /etc/hosts
#退出root
exit
#我的这个仓库直接是一个工作空间,所以可以直接在你的~目录下运行即可,不需要你手动新建工作空间,不需要进入你的src目录
git clone https://github.com/XiaoJake/clion_carto_ws.git
```
## 2. 加载cartographer和cartographer_ros
- **方式1:用网络下载官方最新原版carto代码:**
```
cd ~/clion_carto_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
```
- **方式2:在src目录中直接放入自己的carto代码:**
如果你有自己在注释、优化的carto代码,你可以直接把你的cartographer和cartographer_ros放入~/clion_carto_ws/src目录中即可
## 3. 代码环境安装
### 3.1 ROS Melodic 安装
roswiki官方文档就是最好的:
http://wiki.ros.org/melodic/Installation/Ubuntu
其中讲到的这句命令希望你一定运行它,这样你每次Ctrl+Alt+T新开终端就会自动加载ros环境。
```
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
```
### 3.2 cartographer环境安装
与carto官方指导文档步骤差不太多:
```
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build stow
cd ~/clion_carto_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
sudo apt-get remove ros-${ROS_DISTRO}-abseil-cpp
src/cartographer/scripts/install_abseil.sh
```
> **注意:**
>
> 如果你是ubuntu16.04还需要额外运行下面的命令:这是由于Ubuntu 16及以下系统自带的protobuf版本小于3.0,所以需要运行下面这句代码来源码安装3.4版本的protobuf。ubuntu18.04系统就可以直接略过
>
> ```
> src/cartographer/scripts/install_proto3.sh
> ```
>
> 这里还有个坑爹的地方需要注意!运行上面这句命令后,会在src同级目录下多出一个protobuf目录,在上面的命令运行成功后,要把这个protobuf目录删除!不然,你后面编译carto代码会有proto相关的报错!这个真是非常非常坑,我折腾了好久才发现是这里的问题。。。
>
## 4. 编译&运行工程代码
- **方式1:可与clion兼容的make编译方式:**
(本文推荐这种,目前只有这种方式才可以和clion无缝联动?)
```
cd ~/clion_carto_ws/
mkdir build;cd build
cmake .. -DCATKIN_DEVEL_PREFIX=../devel
make
```
- **方式2:只在终端编译,可用ninja来实现快速编译:**
```
cd ~/clion_carto_ws/
mkdir build;cd build
cmake .. -DCATKIN_DEVEL_PREFIX=../devel -G Ninja
ninja
```
- **好了,运行一下熟悉的官方2d demo看看:**
```
cd ~/clion_carto_ws
source devel/setup.zsh
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
```
 ## 5. 配置clion与clion_carto_ws工程
CLion下载地址:https://www.jetbrains.com/clion/download/other.html
CLion 2019.3.6 安装中 ...
等你把CLion安装好之后,准备工作就算全部做好了。
现在讲讲怎么去配合使用CLion,相信我,使用一段时间后你就会发现它的无比魅力!
### 5.1 启动CLion
```
cd ~/clion_carto_ws
#加载ros环境
source devel/setup.bash
#实现带ros环境启动clion。这行命令要根据你的clion安装目录替换,找到clion.sh文件拖动到终端窗口,回车即可。这是在我电脑上的运行例子
~/APP/clion-2019.3.6/bin/clion.sh
```
### 5.2 在clion中打开clion_carto_ws
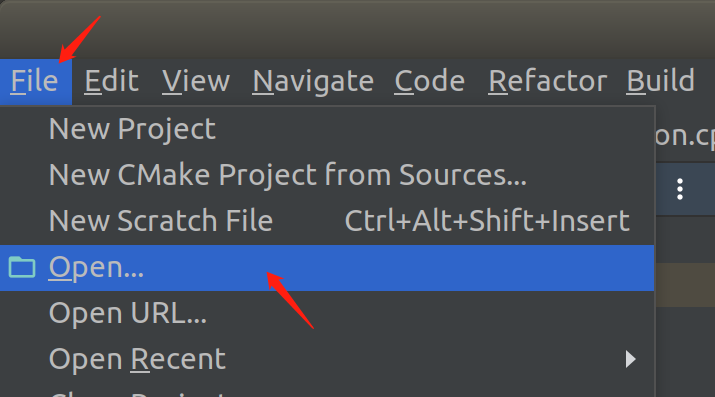
- `File | Open...`
## 5. 配置clion与clion_carto_ws工程
CLion下载地址:https://www.jetbrains.com/clion/download/other.html
CLion 2019.3.6 安装中 ...
等你把CLion安装好之后,准备工作就算全部做好了。
现在讲讲怎么去配合使用CLion,相信我,使用一段时间后你就会发现它的无比魅力!
### 5.1 启动CLion
```
cd ~/clion_carto_ws
#加载ros环境
source devel/setup.bash
#实现带ros环境启动clion。这行命令要根据你的clion安装目录替换,找到clion.sh文件拖动到终端窗口,回车即可。这是在我电脑上的运行例子
~/APP/clion-2019.3.6/bin/clion.sh
```
### 5.2 在clion中打开clion_carto_ws
- `File | Open...`
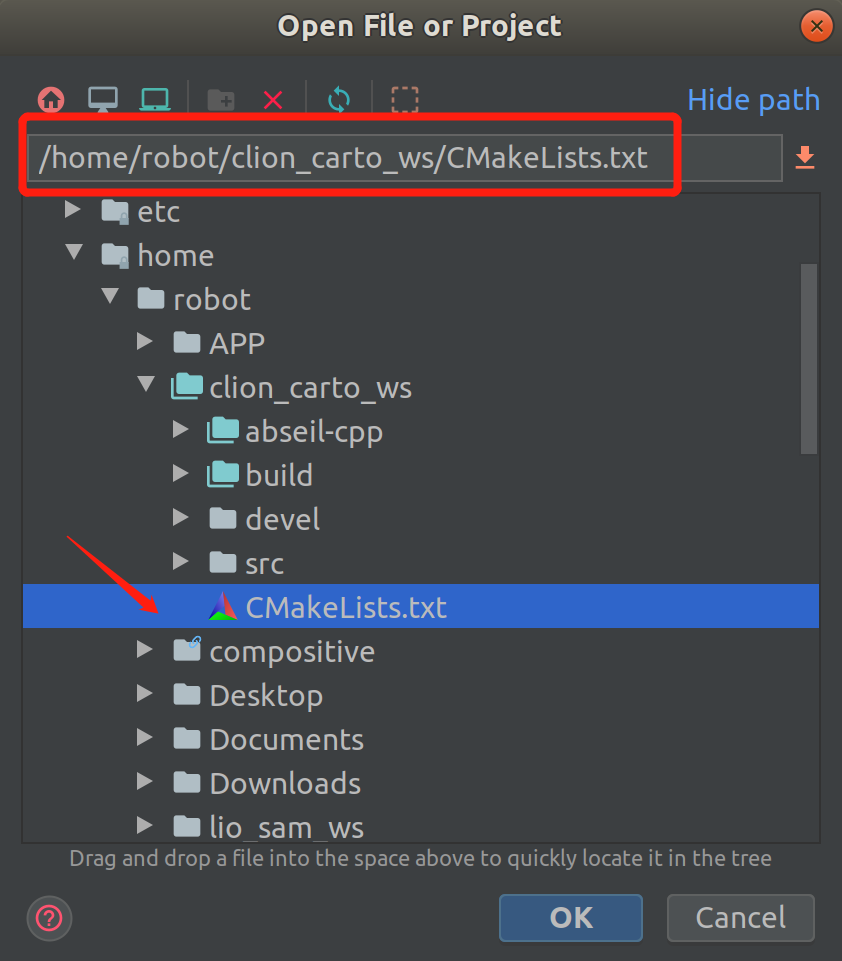
 - 选择clion_carto_ws目录下的CMakeLists.txt
- 选择clion_carto_ws目录下的CMakeLists.txt
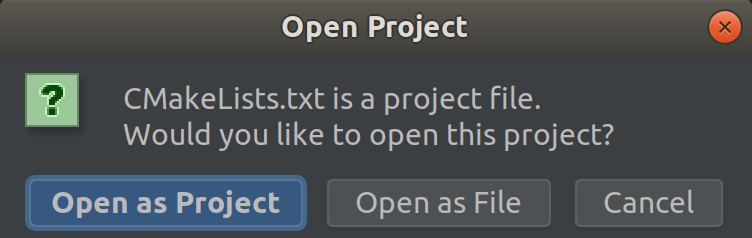
 - Open as Project
- Open as Project
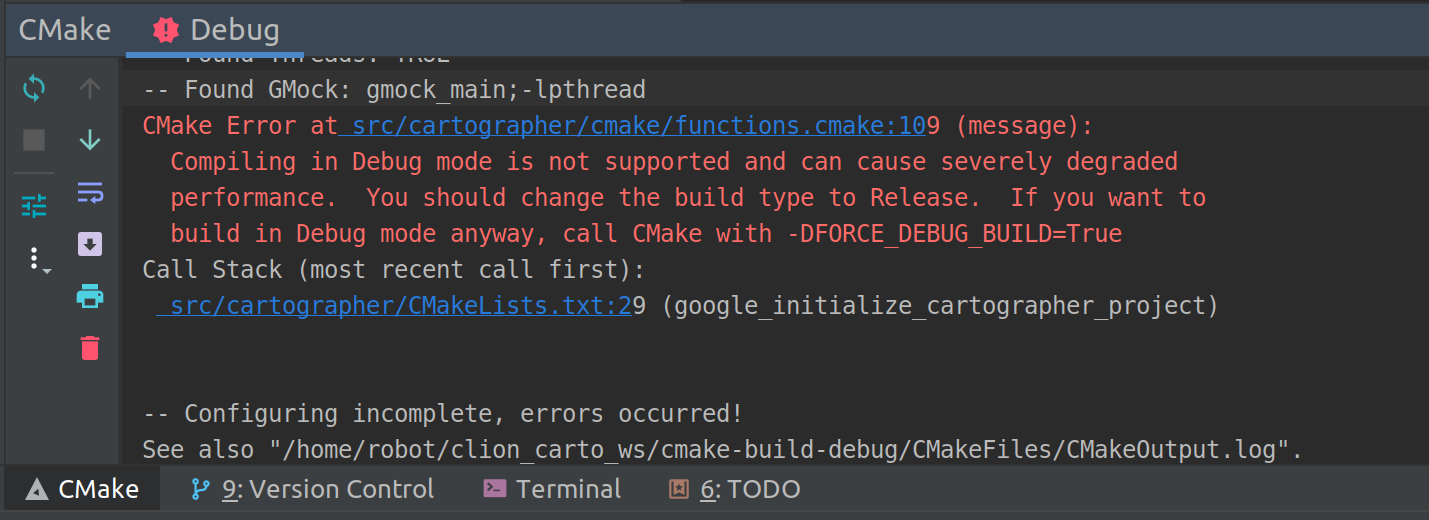
 - 一开始会有这个报错,可以不管,后面配置好之后就会消失:
- 一开始会有这个报错,可以不管,后面配置好之后就会消失:
 ### 5.3 配置好CMake环境
- `File | Settings... | Build, Execution, Deployment | Cmake`
> ! 下面需要用到~目录的绝对路径,每个人都不同,我的是/home/robot。
>
> 即,下面提到的 /home/robot 字符你都需要替换为: /home/你的用户名
- `Build type行选择 RelWithDebinfo 模式(为以后调试我们的carto代码做准备,如果不调试,平时你也可选择release)`
- `设置devel文件夹路径。在CMake options行输入:`
```
-DCATKIN_DEVEL_PREFIX:PATH=/home/robot/carto_clion_ws/devel
```
- `设置build文件夹路径。在Generation path行输入:`
```
/home/robot/carto_clion_ws/build
```
- `配置编译时需要用到的线程数,量力而行,我是配置成系统最大线程数-2=8-2=6。在Build options行输入:`
```
-- -j 6
```
### 5.3 配置好CMake环境
- `File | Settings... | Build, Execution, Deployment | Cmake`
> ! 下面需要用到~目录的绝对路径,每个人都不同,我的是/home/robot。
>
> 即,下面提到的 /home/robot 字符你都需要替换为: /home/你的用户名
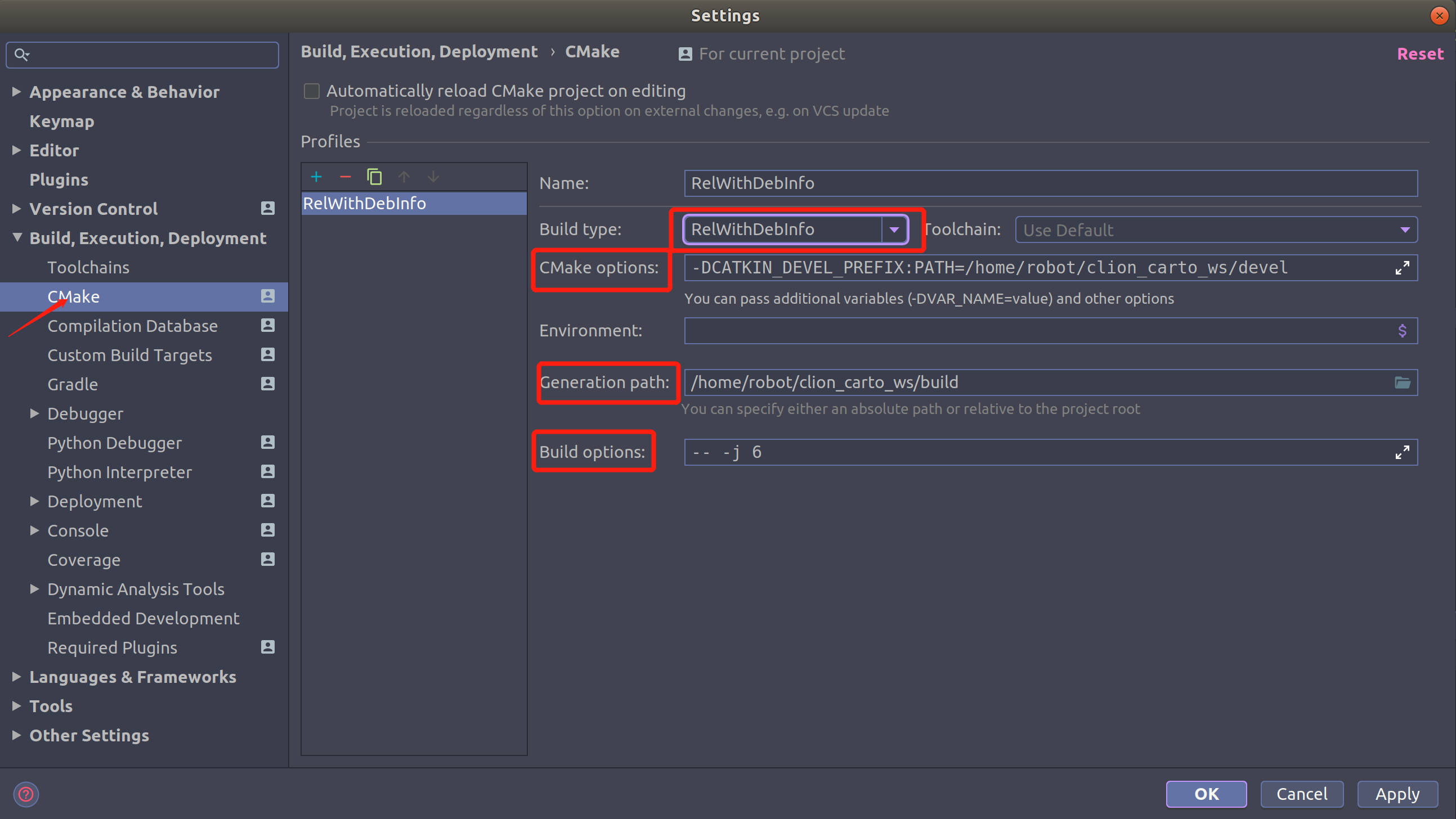
- `Build type行选择 RelWithDebinfo 模式(为以后调试我们的carto代码做准备,如果不调试,平时你也可选择release)`
- `设置devel文件夹路径。在CMake options行输入:`
```
-DCATKIN_DEVEL_PREFIX:PATH=/home/robot/carto_clion_ws/devel
```
- `设置build文件夹路径。在Generation path行输入:`
```
/home/robot/carto_clion_ws/build
```
- `配置编译时需要用到的线程数,量力而行,我是配置成系统最大线程数-2=8-2=6。在Build options行输入:`
```
-- -j 6
```
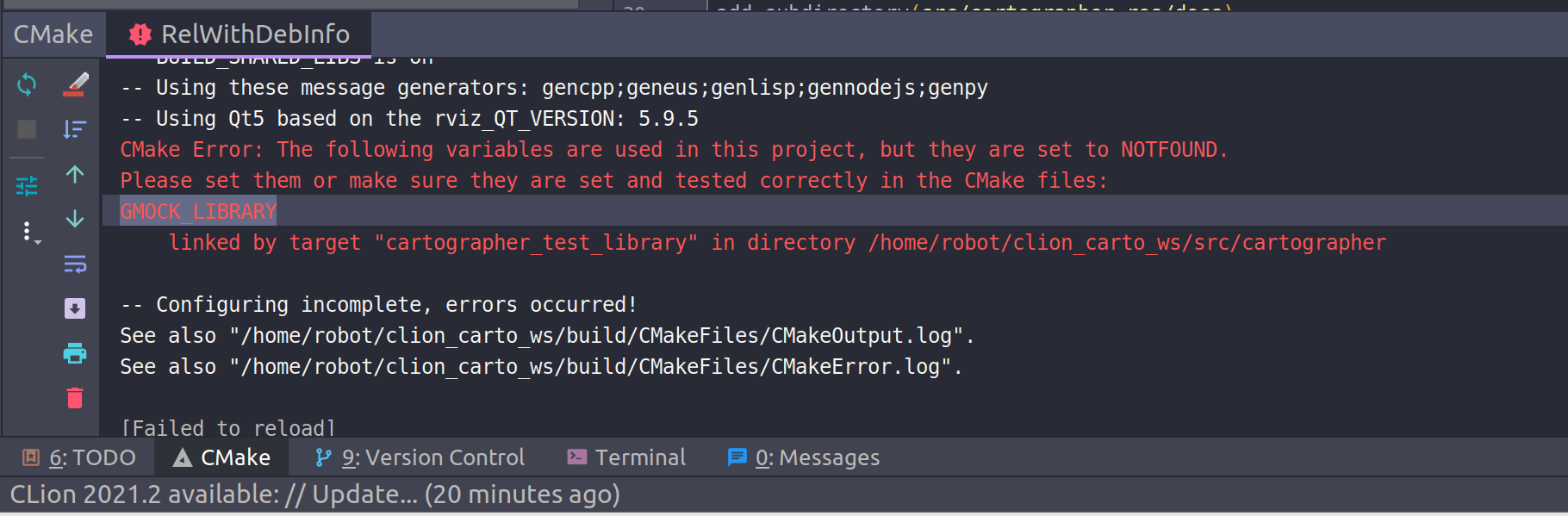
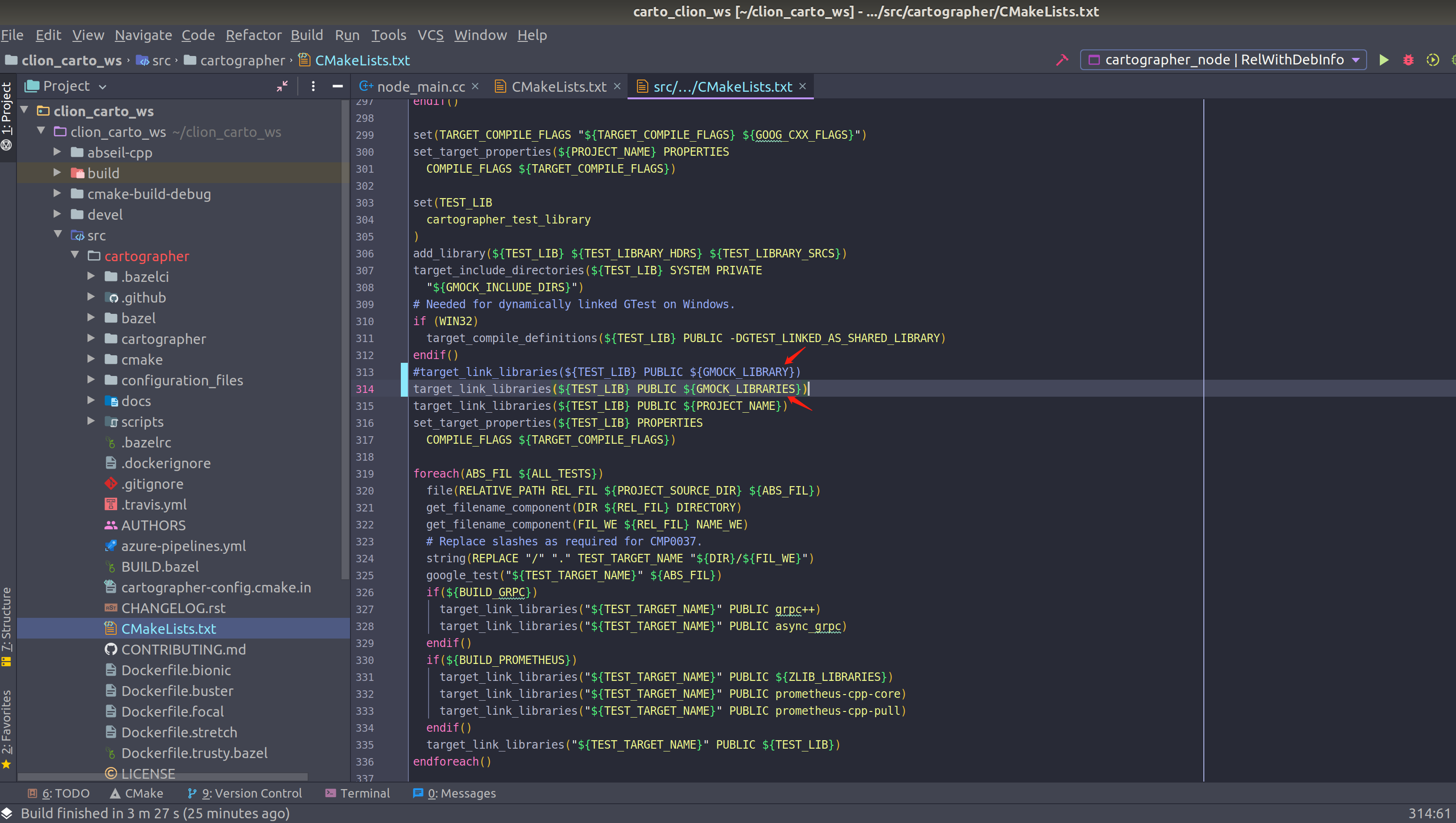
 - 问题解决:
很奇怪,官方的源码编译时都会遇到报错:找不到 GMOCK_LIBRARY
- 问题解决:
很奇怪,官方的源码编译时都会遇到报错:找不到 GMOCK_LIBRARY
 只需要在carto源码里做点小修改:
1)到/home/robot/clion_carto_ws/src/cartographer/CMakeLists.txt 的大概313行,修改成这样:
```
#target_link_libraries(${TEST_LIB} PUBLIC ${GMOCK_LIBRARY})
target_link_libraries(${TEST_LIB} PUBLIC ${GMOCK_LIBRARIES})
```
只需要在carto源码里做点小修改:
1)到/home/robot/clion_carto_ws/src/cartographer/CMakeLists.txt 的大概313行,修改成这样:
```
#target_link_libraries(${TEST_LIB} PUBLIC ${GMOCK_LIBRARY})
target_link_libraries(${TEST_LIB} PUBLIC ${GMOCK_LIBRARIES})
```
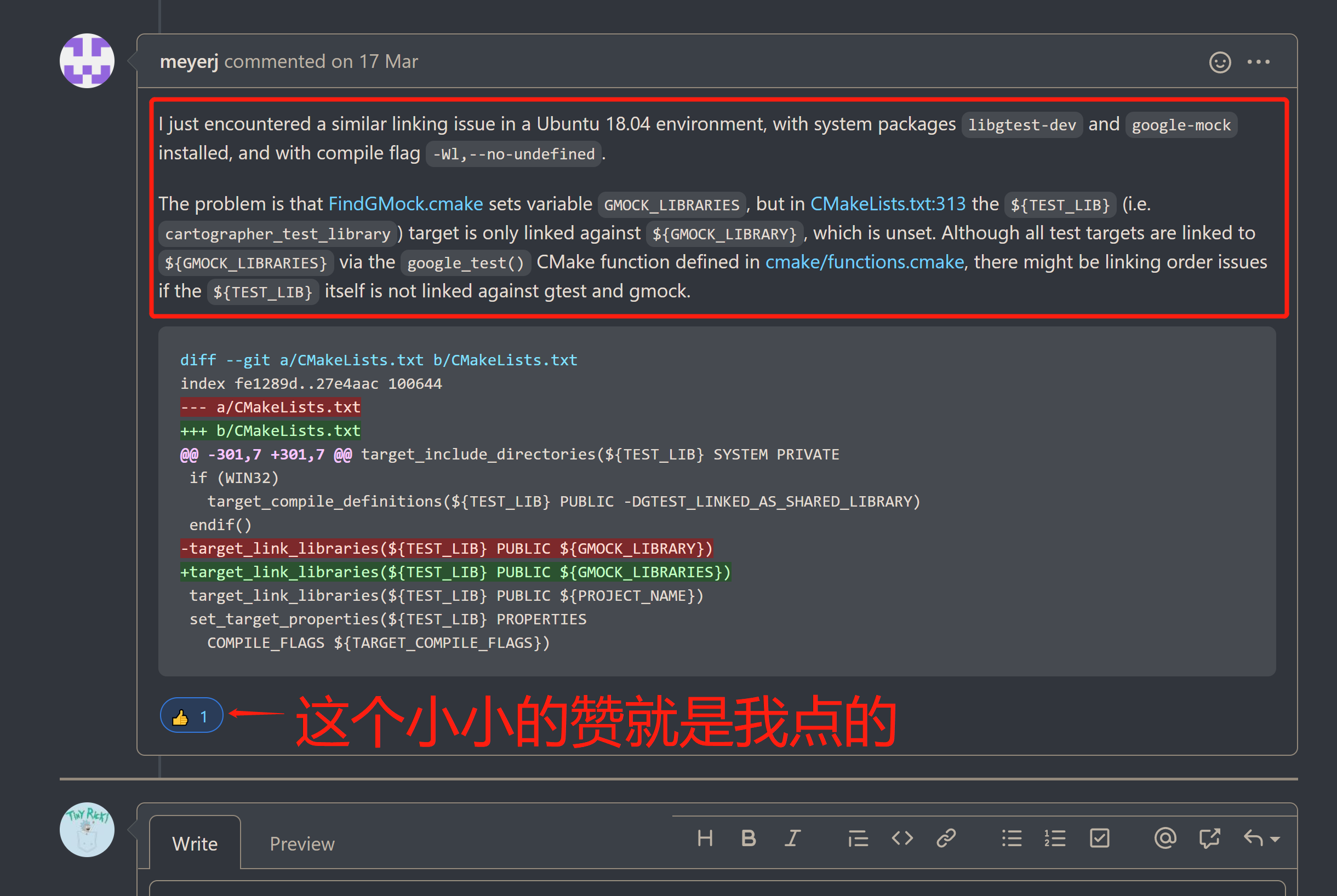
 2)对背后的原因感兴趣的朋友,可以看这里: https://github.com/cartographer-project/cartographer/issues/1611
2)对背后的原因感兴趣的朋友,可以看这里: https://github.com/cartographer-project/cartographer/issues/1611
 ### 5.4 编译并配置 Run/Debug环境 (可实现代码自动补全)
1)**先在CLIon中完成编译**。这个小锤图标就是"编译",也可以按快捷键:Ctrl+F9
### 5.4 编译并配置 Run/Debug环境 (可实现代码自动补全)
1)**先在CLIon中完成编译**。这个小锤图标就是"编译",也可以按快捷键:Ctrl+F9
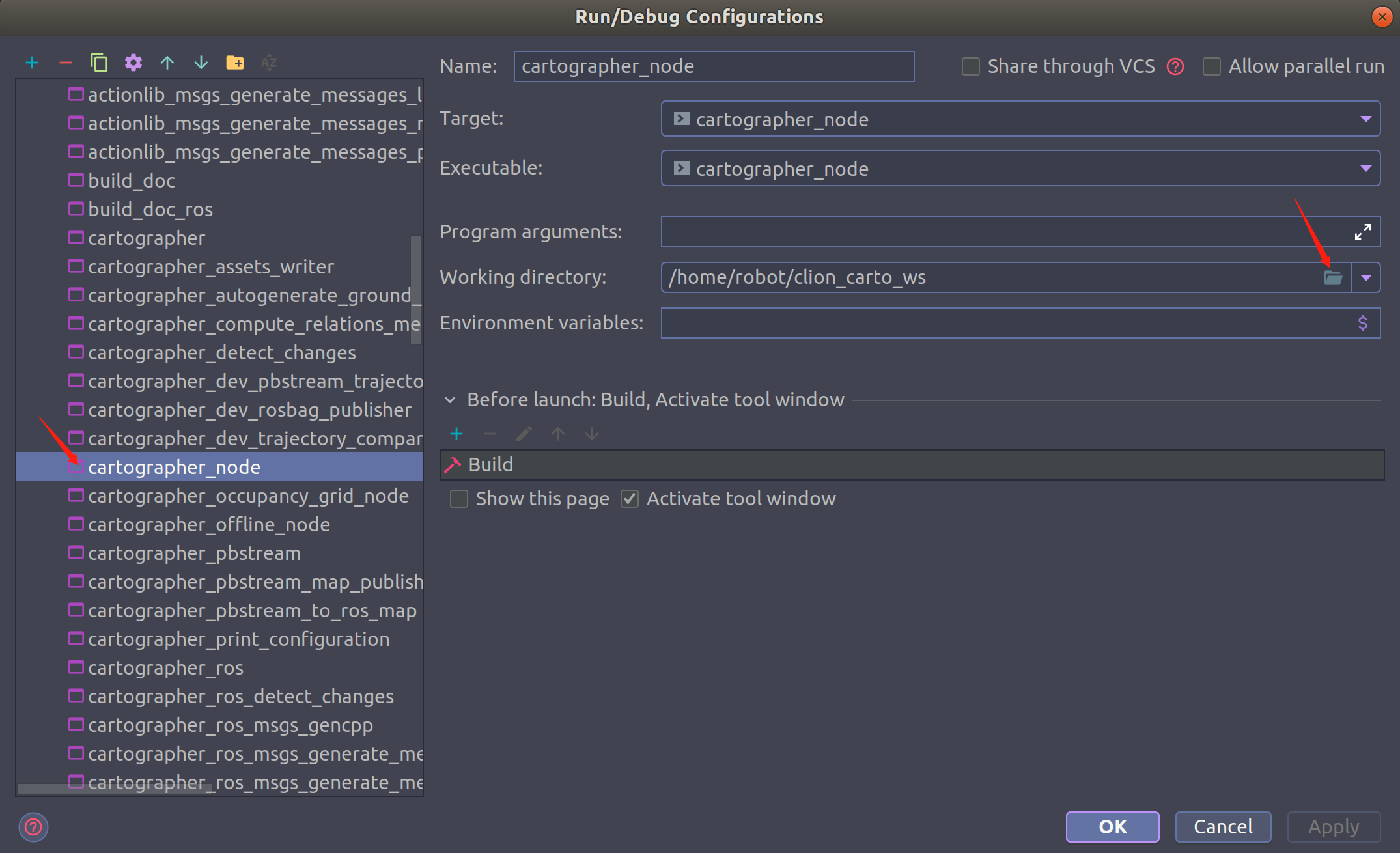
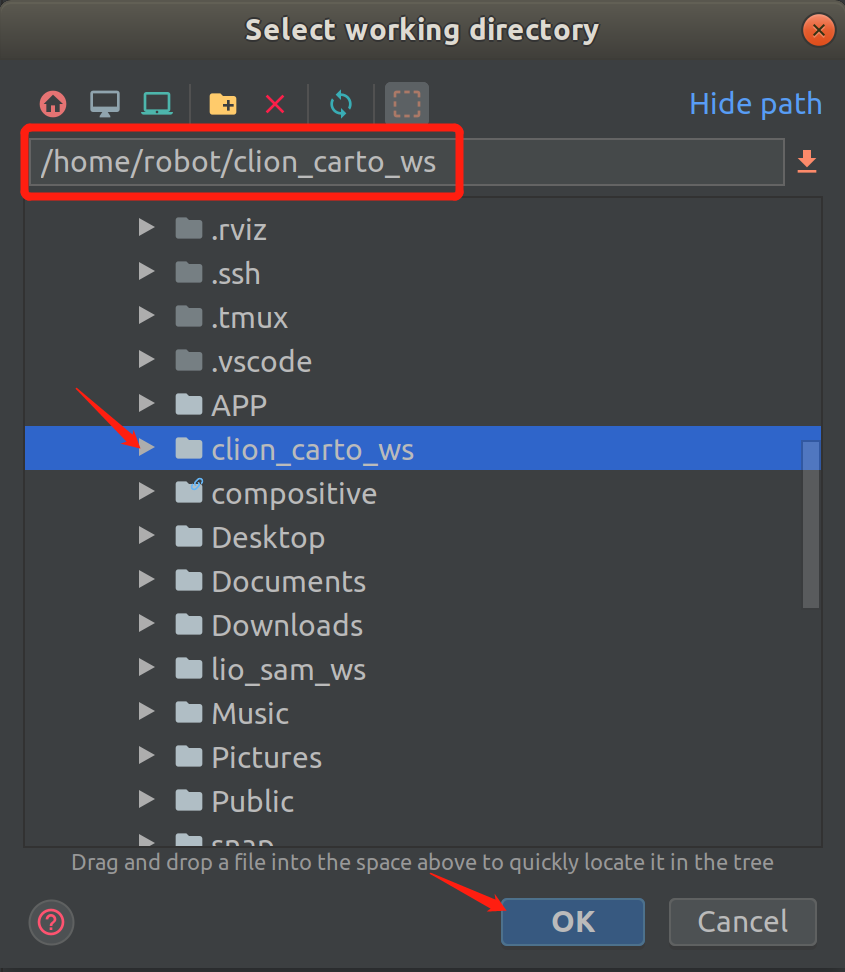
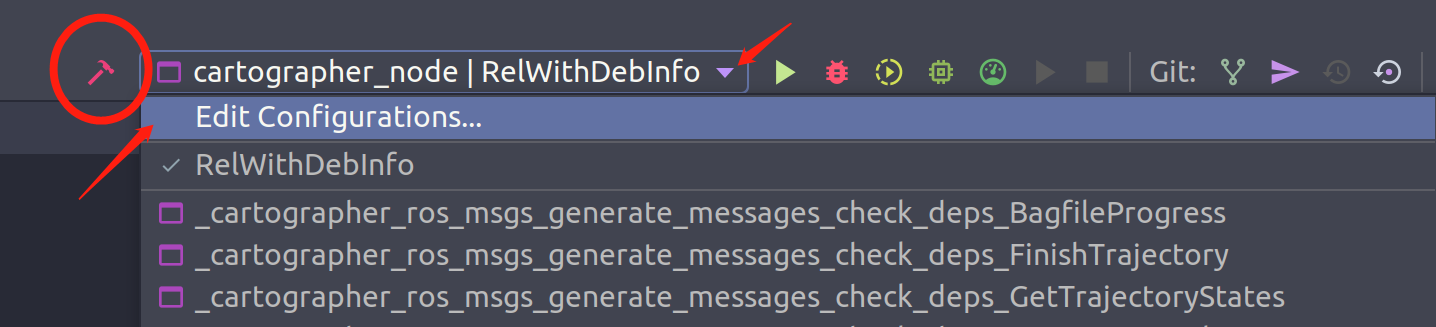 2)编译成功后
`点击下拉箭头 | Edit Configurations... | 在左侧找到并点击 cartographer_node | 点击 working directory 行的文件夹图标 | 只选择到clion_carto_ws工作空间目录这里就可以了`
2)编译成功后
`点击下拉箭头 | Edit Configurations... | 在左侧找到并点击 cartographer_node | 点击 working directory 行的文件夹图标 | 只选择到clion_carto_ws工作空间目录这里就可以了`
 **至此,已经完成了所有关键工作,你已经可以在carto的代码世界里畅游了!**
## 6.CLion插件推荐、使用技巧与美化
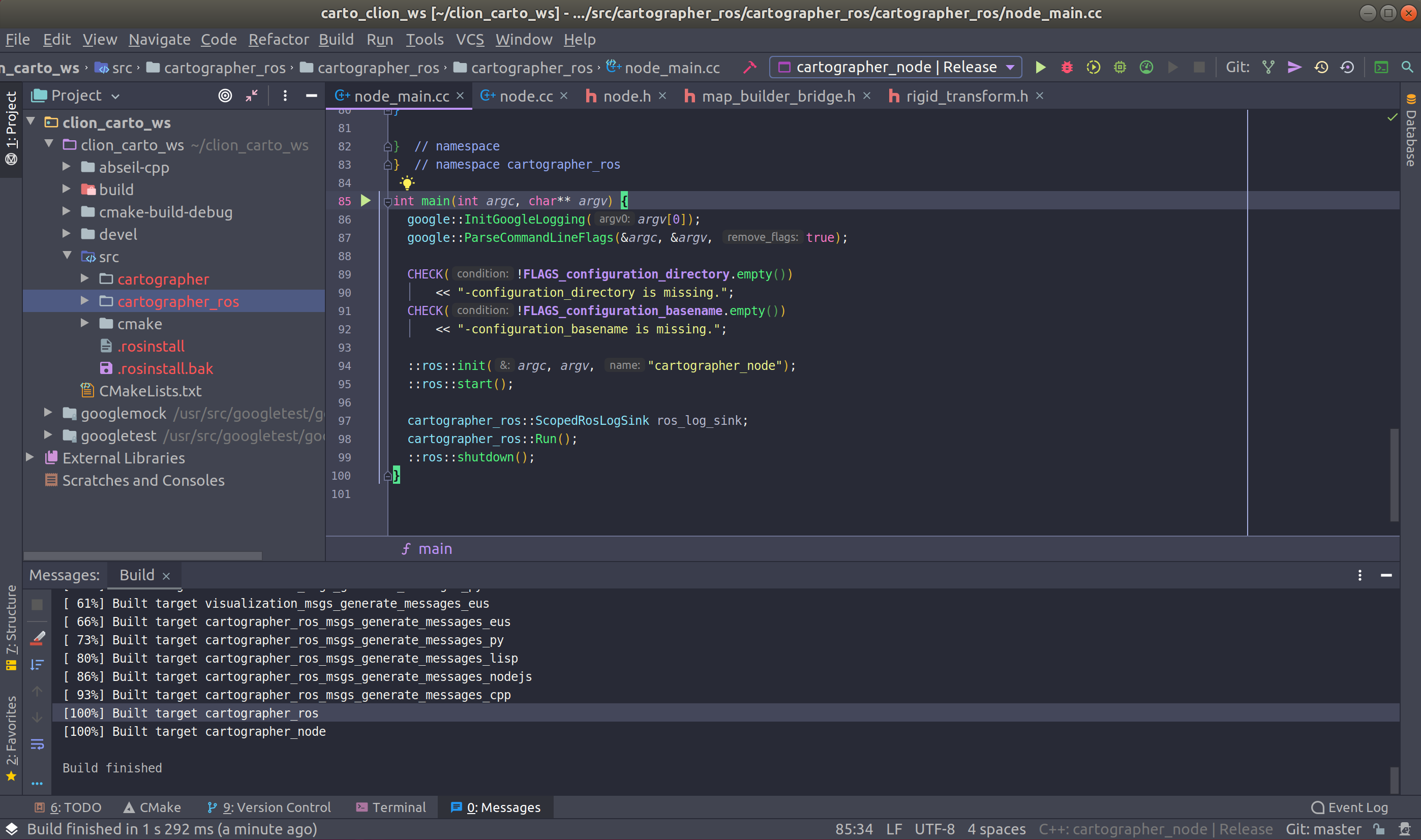
先看看对比效果吧
优化clion之前:
**至此,已经完成了所有关键工作,你已经可以在carto的代码世界里畅游了!**
## 6.CLion插件推荐、使用技巧与美化
先看看对比效果吧
优化clion之前:
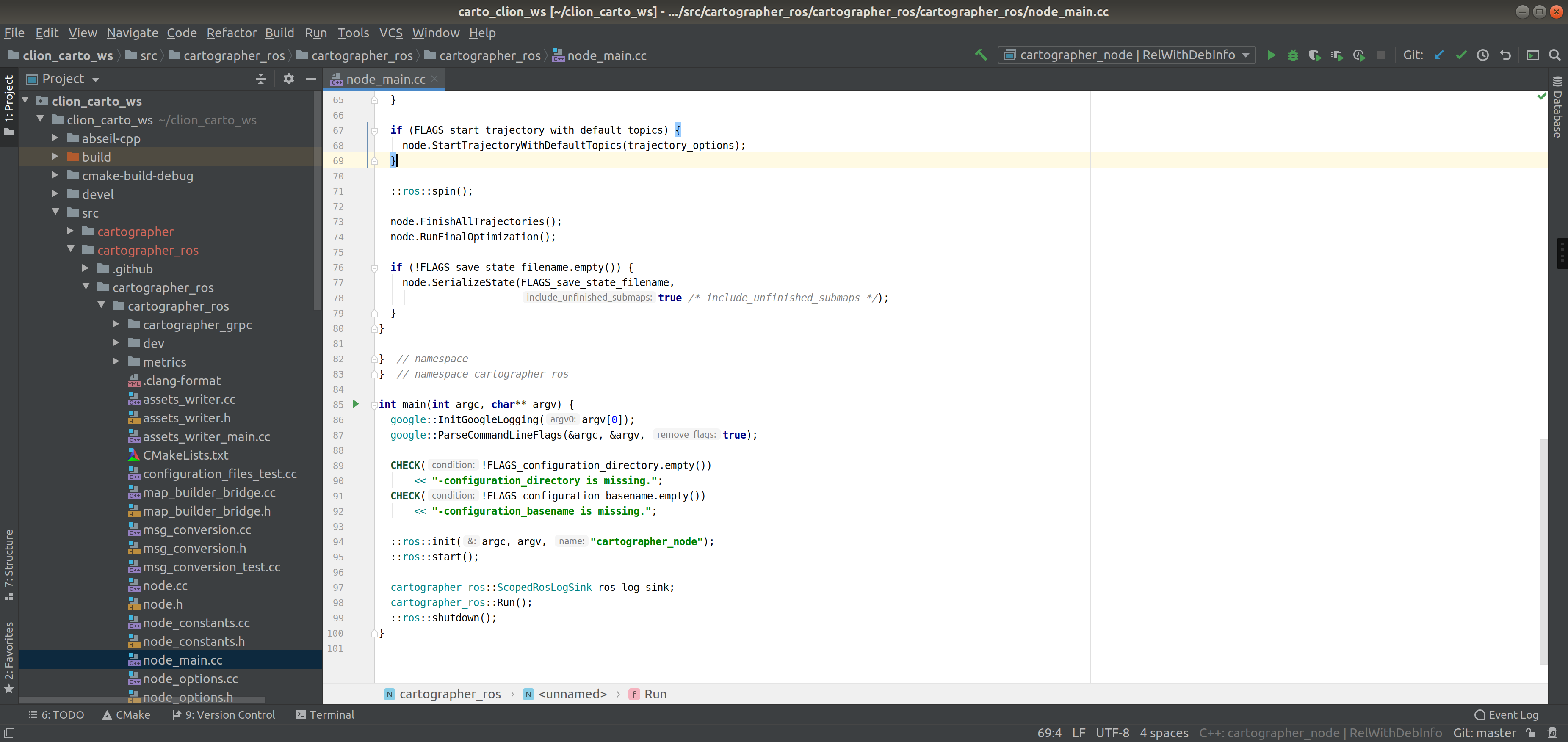 优化clion之后:
优化clion之后:
 ### 6.1 插件安装
`File | Settings... | plugins | 搜索插件名,并点击install来安装,全部安装完之后需要重启CLion才会生效`
### 6.1 插件安装
`File | Settings... | plugins | 搜索插件名,并点击install来安装,全部安装完之后需要重启CLion才会生效`
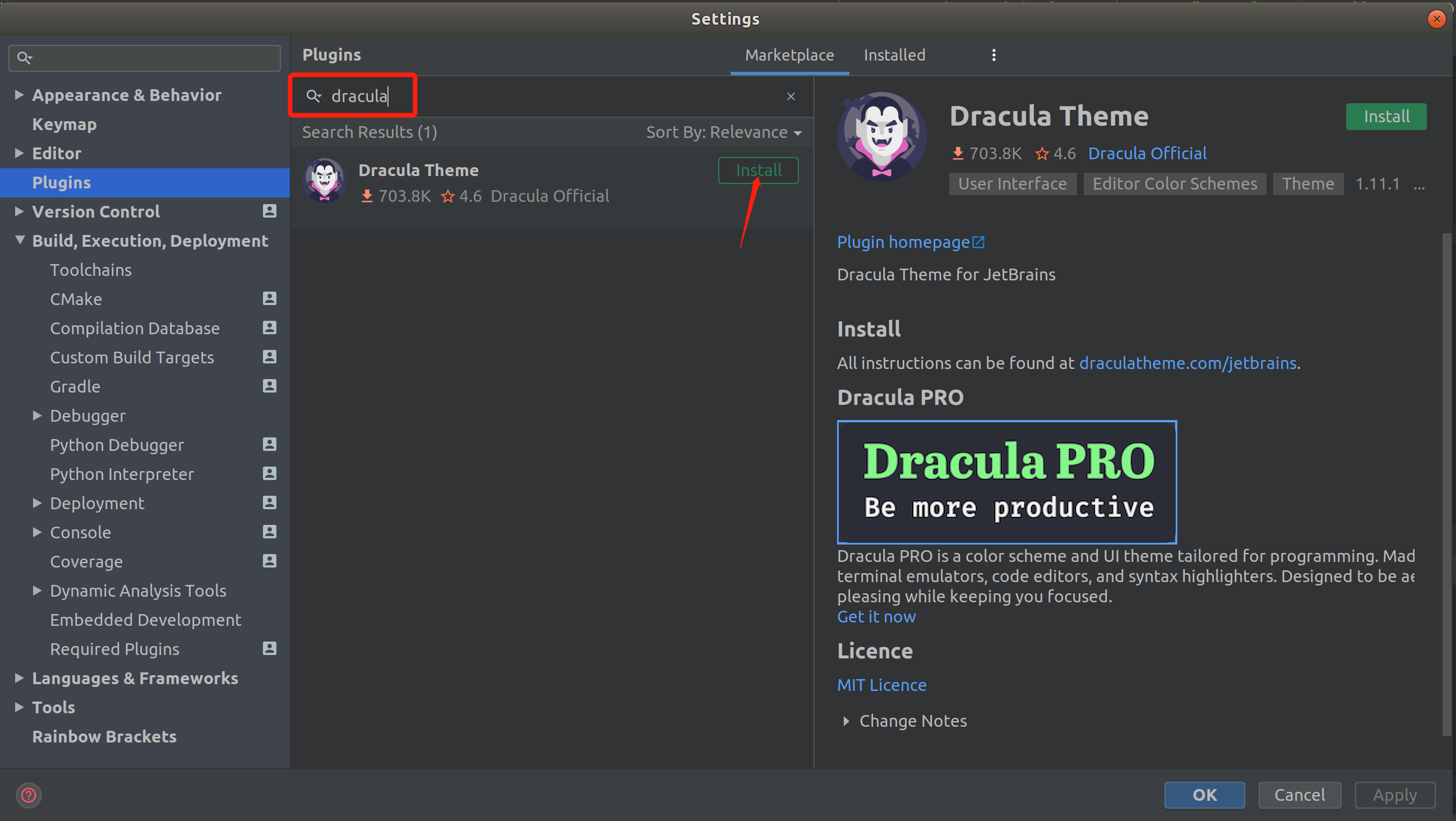 推荐安装的插件:
`Dracula Theme` : 这是我喜欢的一种暗紫色的吸血鬼风格主题,会让你的界面和代码颜色都产生变化,阅读起来很醒目又护眼,不累
`Atom Material Icons`:给侧边栏显示的文件,根据不同文件类型匹配一个不同的图标,也是为了看起来更醒目,更好看
`HighlightBracketPair`:高亮代码里匹配的{}等,并用竖线连接起来
`Rainbow Brackets`:给代码里匹配的括号分配不同的颜色
`Grep Console`:在调试时,对调试内容输出窗口的 info,warning,error,fatal等信息行分配不同的颜色,让你更改的阅读内容
插件安装3-7个就够了。clion本身就很强大,集成了很多小功能,已经足够你去探索了。插件安装太多会卡,反而体验不好。
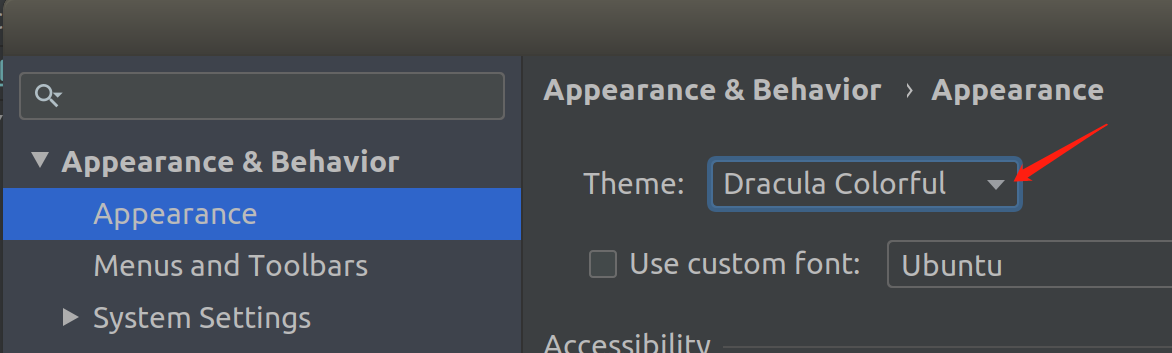
Dracula Theme 提供了多种风格,默认加载的不是很好看,推荐选择 Dracula Colorful 风格
`File | Settings... | Appearance | 点击Theme的下拉箭头,选择 Dracula Colorful | 点击OK后会直接生效`
推荐安装的插件:
`Dracula Theme` : 这是我喜欢的一种暗紫色的吸血鬼风格主题,会让你的界面和代码颜色都产生变化,阅读起来很醒目又护眼,不累
`Atom Material Icons`:给侧边栏显示的文件,根据不同文件类型匹配一个不同的图标,也是为了看起来更醒目,更好看
`HighlightBracketPair`:高亮代码里匹配的{}等,并用竖线连接起来
`Rainbow Brackets`:给代码里匹配的括号分配不同的颜色
`Grep Console`:在调试时,对调试内容输出窗口的 info,warning,error,fatal等信息行分配不同的颜色,让你更改的阅读内容
插件安装3-7个就够了。clion本身就很强大,集成了很多小功能,已经足够你去探索了。插件安装太多会卡,反而体验不好。
Dracula Theme 提供了多种风格,默认加载的不是很好看,推荐选择 Dracula Colorful 风格
`File | Settings... | Appearance | 点击Theme的下拉箭头,选择 Dracula Colorful | 点击OK后会直接生效`
 ### 6.2 优化clion的启动方式
第一次启动clion的时候需要新开终端,并在命令行里加载ros环境,运行CLion软件启动脚本,每次启动都这样,未免有点麻烦了。
下面的方法是实现在侧边任务栏点击一下图标就实现启动:
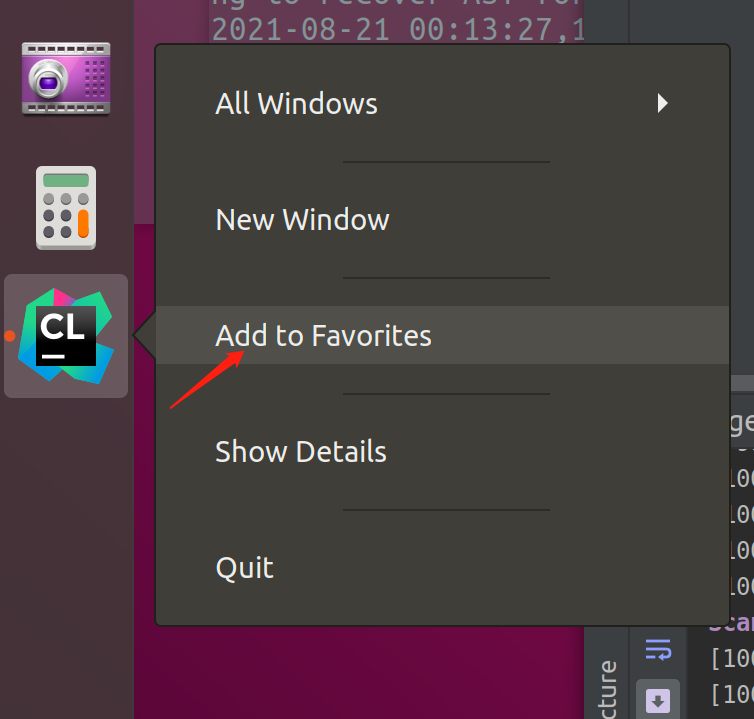
1)在任务栏右键clion图标 | Add to Favorites ,这样你每次就可以直接侧边栏的clion图标来启动了
### 6.2 优化clion的启动方式
第一次启动clion的时候需要新开终端,并在命令行里加载ros环境,运行CLion软件启动脚本,每次启动都这样,未免有点麻烦了。
下面的方法是实现在侧边任务栏点击一下图标就实现启动:
1)在任务栏右键clion图标 | Add to Favorites ,这样你每次就可以直接侧边栏的clion图标来启动了
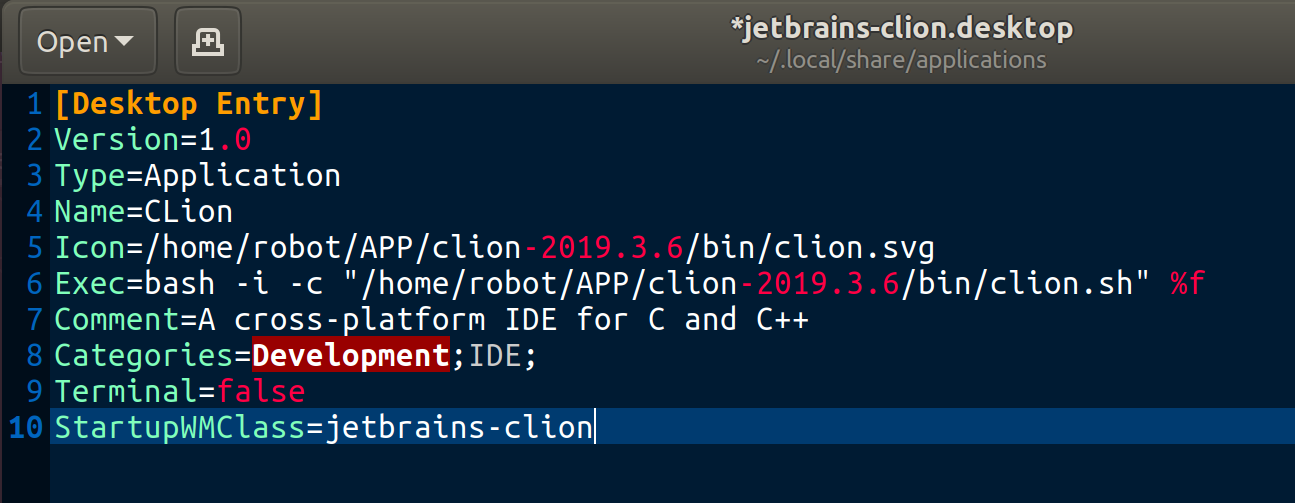
 2)编辑clion的图标启动脚本,让clion每次启动自动加载ros环境(不加载ros环境clion会无法编译,报错)
```
gedit ~/.local/share/applications/jetbrains-clion.desktop
```
Exec="/home/robot/APP/clion-2019.3.6/bin/clion.sh" %f
改为:
Exec=bash -i -c "/home/robot/APP/clion-2019.3.6/bin/clion.sh" %f
2)编辑clion的图标启动脚本,让clion每次启动自动加载ros环境(不加载ros环境clion会无法编译,报错)
```
gedit ~/.local/share/applications/jetbrains-clion.desktop
```
Exec="/home/robot/APP/clion-2019.3.6/bin/clion.sh" %f
改为:
Exec=bash -i -c "/home/robot/APP/clion-2019.3.6/bin/clion.sh" %f
 > **注意:**
>
> 在我vmware虚拟机的ubuntu 18.04系统中,这样设置后,我从侧边任务栏单机或者桌面双击CLion图标,会无法启动,只会新增一个cpu占用100%的bash线程。但是开机后的第一次点击或者去到 ~/.local/share/applications/ 目录下双击却能正常开启,这是个奇怪的问题,我目前还没找到原因和解决办法。
>
> 但是,在我的ubuntu 16.04上该方法是可行的。
### 6.3 一点clion的高效率小技巧
| 快捷键 | 功能 | 效果图 |
| -------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
| Ctrl+鼠标左键 | 查看声明/定义 | |
| Ctrl+Alt+7 | 查看引用(可以精确地知道某个变量/函数
> **注意:**
>
> 在我vmware虚拟机的ubuntu 18.04系统中,这样设置后,我从侧边任务栏单机或者桌面双击CLion图标,会无法启动,只会新增一个cpu占用100%的bash线程。但是开机后的第一次点击或者去到 ~/.local/share/applications/ 目录下双击却能正常开启,这是个奇怪的问题,我目前还没找到原因和解决办法。
>
> 但是,在我的ubuntu 16.04上该方法是可行的。
### 6.3 一点clion的高效率小技巧
| 快捷键 | 功能 | 效果图 |
| -------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
| Ctrl+鼠标左键 | 查看声明/定义 | |
| Ctrl+Alt+7 | 查看引用(可以精确地知道某个变量/函数
在代码中的调用地方,对研究代码逻辑很有帮助) | 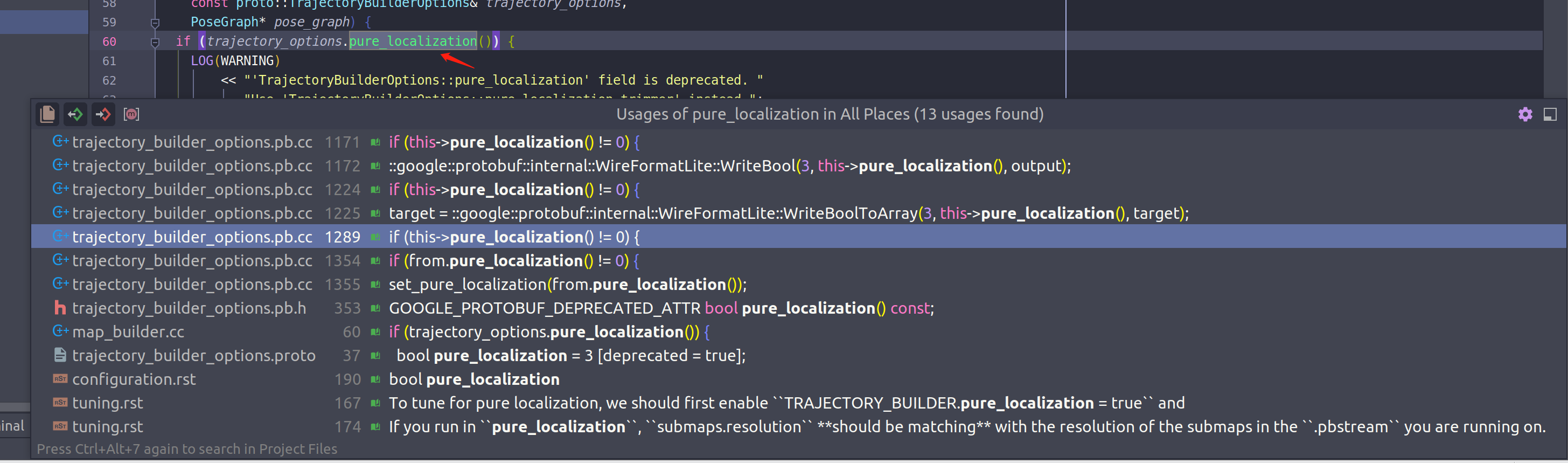 |
| Ctrl+Shift+F | 全局搜索 | |
| Ctrl+Tab | 回到上一个文件 | |
| Ctrl+E | 查看文件浏览历史 |
|
| Ctrl+Shift+F | 全局搜索 | |
| Ctrl+Tab | 回到上一个文件 | |
| Ctrl+E | 查看文件浏览历史 | 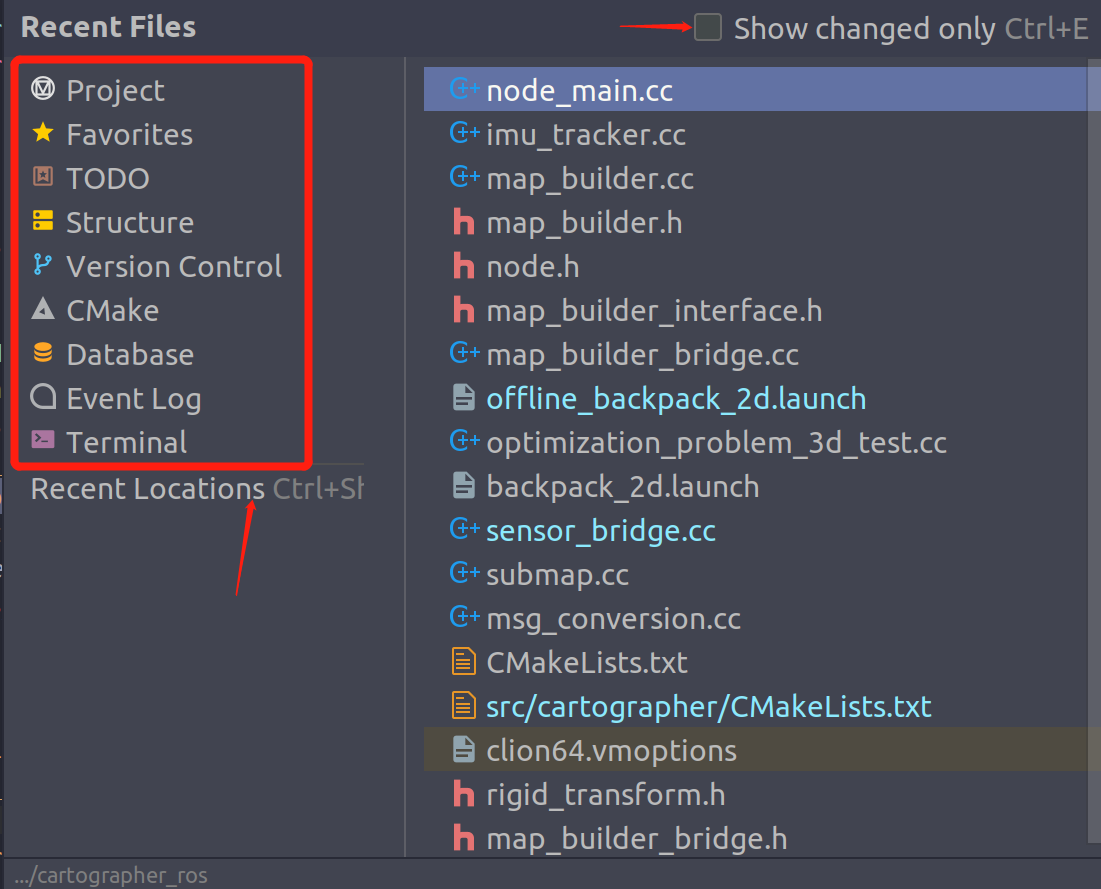 |
| Ctrl+Ctrl+E | 查看代码行浏览历史 |
|
| Ctrl+Ctrl+E | 查看代码行浏览历史 | 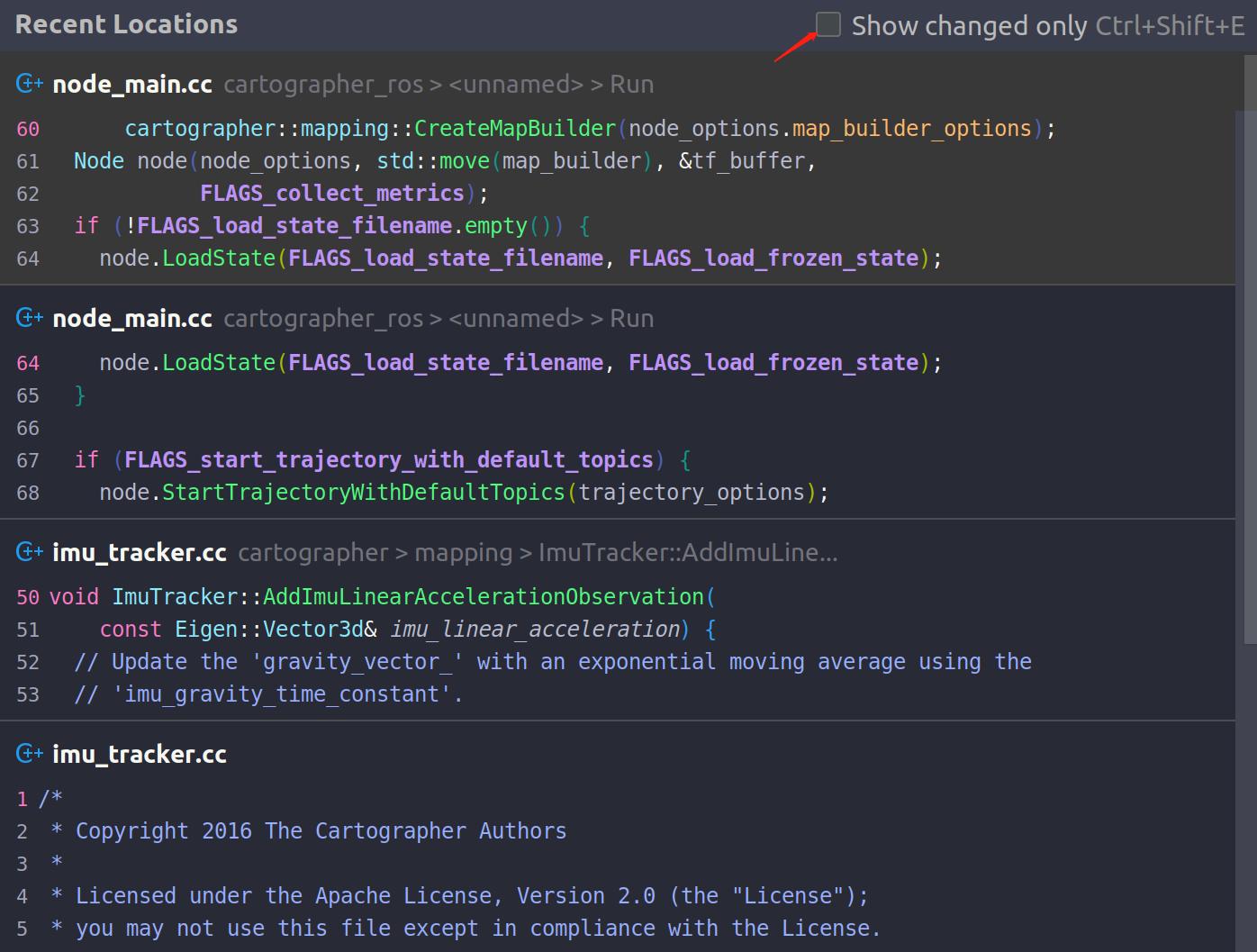 |
| Alt+Ctrl+左/右方向键 | 后退/前进到上一次浏览的代码行 | |
| Ctrl+H | 查看当前类的 继承关系 |
|
| Alt+Ctrl+左/右方向键 | 后退/前进到上一次浏览的代码行 | |
| Ctrl+H | 查看当前类的 继承关系 | 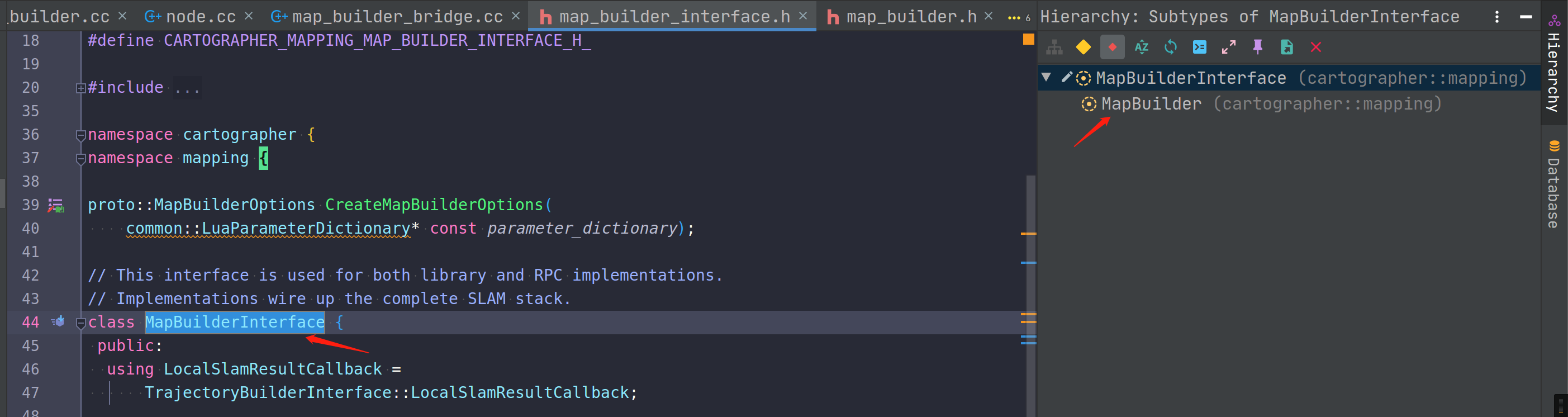 |
| Ctrl+Alt+L | 对选中代码行的风格规范化 | |
| Ctrl+Alt+Home | 源文件和头文件之间反复横跳 | |
| 双击Shift | 弹出类、文件、变量符等的搜索窗 |
|
| Ctrl+Alt+L | 对选中代码行的风格规范化 | |
| Ctrl+Alt+Home | 源文件和头文件之间反复横跳 | |
| 双击Shift | 弹出类、文件、变量符等的搜索窗 | 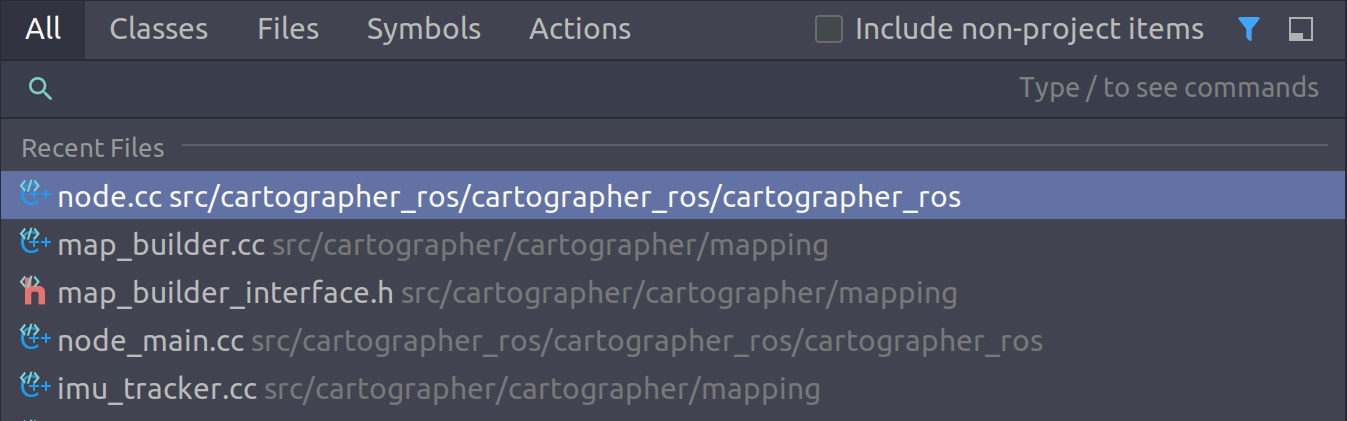 |
- 关于 Ctrl+H:查看当前类的 继承关系。这个我特别讲一下它能解决的问题:
在carto中有基类的设计,**代码中许多指针,引用,函数参数都是以基类定义的**。这导致你**查看函数定义时只会跳转到对应基类的声明中**。基类只是接口声明,没有代码实现,这样你就**无法直接知道代码运行时实际调用的函数实现是什么**。
以 src/cartographer_ros/cartographer_ros/cartographer_ros/map_builder_bridge.cc 文件约118行为例:
> map_builder_->LoadState(&stream, load_frozen_state);
1)Ctrl+鼠标左键点击 LoadState 函数会跳转到基类 map_builder_interfere 中的声明处
2)往上翻,鼠标左键点击map_builder_interfere类声明后,Ctrl+H
3)右侧会出现类的基础关系栏,可以看到它只被MapBuilder类继承,那么我们想查看的 LoadState 函数实现肯定就在这个类里!
4)我们点击MapBuilder类之后,Ctrl+F 搜索找到 LoadState ,再次Ctrl+鼠标左键查看定义,就看到了最终的代码实现了
以上方法主要是针对第一次看carto代码,还不熟悉它的代码、文件结构,逻辑关系时。后面熟悉了,可以直接找到相应文件去可能会快一点。
关于CLion的高效率技巧真的是很多,要讲完篇幅就太长了,我这里只讲了快捷键部分,这些都是我感觉比较实用的分享给大家。
剩下的大家可以自己去探索,我后面可能会单独出一篇讲CLion实用技巧的。
## 7.写在最后
这个方法也是最近才研究出来,刚好自己又需要搭建一个新的Ubuntu 18.04环境,于是觉得正好可以写一篇文章分享出来。自己平时也很少写公开博客之类的,对MarkDown还不是很熟悉。本以为应该写不了多久,第一版写出来觉得太简单,又补充补充,没想到这前前后后写了好几天 ...
我是在本地typora编辑的,想放到知乎上还遇到了一些问题,如果图片、文字格式要重新整理的话,可能还得晚几天才能发了。(我其实是有写目录的,但知乎上好像还不支持这个功能。)
难以忍受这样的低效率,幸好找到了这位知乎大神@Adapting的方法:在vscode上安装 Zhihu On VSCode 插件。不仅解决了问题,还有提前预览的功能,在此表示感谢!
> 为什么知乎不支持 MarkDown ? - Adapting的回答 - 知乎 https://www.zhihu.com/question/21560499/answer/2071395353
本着负责的态度,我是从搭环境一步一步记录过来的,步骤都有经过我的验证,所以**文中的代码块应该都是可以直接整体复制,放在终端里粘贴回车运行即可**(不用担心#号的注释内容,会被自动忽略),不需要一行一行的粘贴,这样大家会方便一点。如果还有其它问题,欢迎在评论里与我交流,我再进行更改。
对了,还有**“怎么在CLion里去 Debug单步调试 cartographer代码”**没有讲到,我就放在下次吧。
希望这些内容能切实的给大家带来一点帮助!
|
- 关于 Ctrl+H:查看当前类的 继承关系。这个我特别讲一下它能解决的问题:
在carto中有基类的设计,**代码中许多指针,引用,函数参数都是以基类定义的**。这导致你**查看函数定义时只会跳转到对应基类的声明中**。基类只是接口声明,没有代码实现,这样你就**无法直接知道代码运行时实际调用的函数实现是什么**。
以 src/cartographer_ros/cartographer_ros/cartographer_ros/map_builder_bridge.cc 文件约118行为例:
> map_builder_->LoadState(&stream, load_frozen_state);
1)Ctrl+鼠标左键点击 LoadState 函数会跳转到基类 map_builder_interfere 中的声明处
2)往上翻,鼠标左键点击map_builder_interfere类声明后,Ctrl+H
3)右侧会出现类的基础关系栏,可以看到它只被MapBuilder类继承,那么我们想查看的 LoadState 函数实现肯定就在这个类里!
4)我们点击MapBuilder类之后,Ctrl+F 搜索找到 LoadState ,再次Ctrl+鼠标左键查看定义,就看到了最终的代码实现了
以上方法主要是针对第一次看carto代码,还不熟悉它的代码、文件结构,逻辑关系时。后面熟悉了,可以直接找到相应文件去可能会快一点。
关于CLion的高效率技巧真的是很多,要讲完篇幅就太长了,我这里只讲了快捷键部分,这些都是我感觉比较实用的分享给大家。
剩下的大家可以自己去探索,我后面可能会单独出一篇讲CLion实用技巧的。
## 7.写在最后
这个方法也是最近才研究出来,刚好自己又需要搭建一个新的Ubuntu 18.04环境,于是觉得正好可以写一篇文章分享出来。自己平时也很少写公开博客之类的,对MarkDown还不是很熟悉。本以为应该写不了多久,第一版写出来觉得太简单,又补充补充,没想到这前前后后写了好几天 ...
我是在本地typora编辑的,想放到知乎上还遇到了一些问题,如果图片、文字格式要重新整理的话,可能还得晚几天才能发了。(我其实是有写目录的,但知乎上好像还不支持这个功能。)
难以忍受这样的低效率,幸好找到了这位知乎大神@Adapting的方法:在vscode上安装 Zhihu On VSCode 插件。不仅解决了问题,还有提前预览的功能,在此表示感谢!
> 为什么知乎不支持 MarkDown ? - Adapting的回答 - 知乎 https://www.zhihu.com/question/21560499/answer/2071395353
本着负责的态度,我是从搭环境一步一步记录过来的,步骤都有经过我的验证,所以**文中的代码块应该都是可以直接整体复制,放在终端里粘贴回车运行即可**(不用担心#号的注释内容,会被自动忽略),不需要一行一行的粘贴,这样大家会方便一点。如果还有其它问题,欢迎在评论里与我交流,我再进行更改。
对了,还有**“怎么在CLion里去 Debug单步调试 cartographer代码”**没有讲到,我就放在下次吧。
希望这些内容能切实的给大家带来一点帮助!