# Stereo-Visual-Odometry
**Repository Path**: xinhua6/Stereo-Visual-Odometry
## Basic Information
- **Project Name**: Stereo-Visual-Odometry
- **Description**: Stereo Visual Odometry system for self-driving cars using image sequences from KITTI dataset
- **Primary Language**: C++
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 1
- **Created**: 2019-05-21
- **Last Updated**: 2020-12-19
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
## Synopsis
System is developed to achieve Visual Odometry for a moving car, using the output of a stereo camera. Rectified stereo images from a moving camera is used to estimate camera pose and reconstruct a 3D map of scene points. Our system is further optimized using bundle adjustment and pose-graph optimization. Developed model was used to estimate the trajectory of the camera for various scenarios in the KITTI dataset.
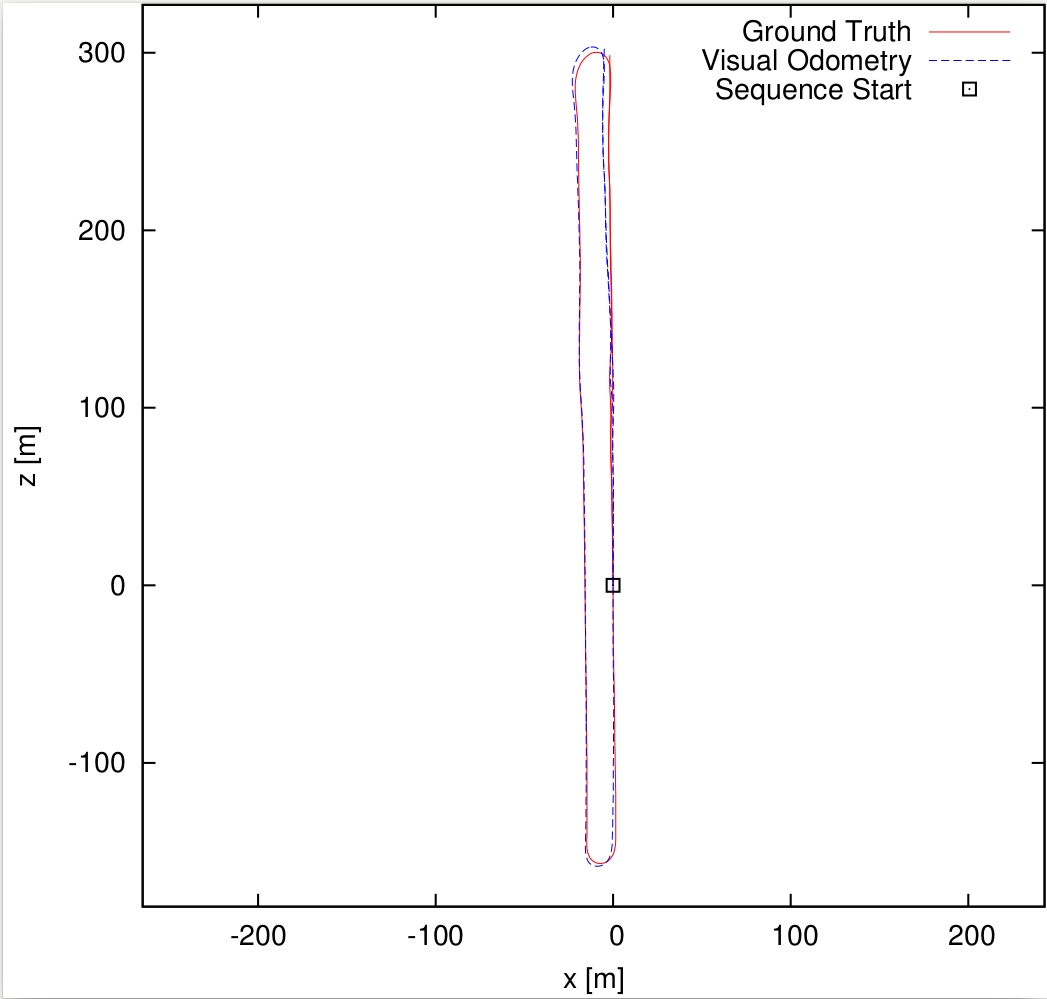
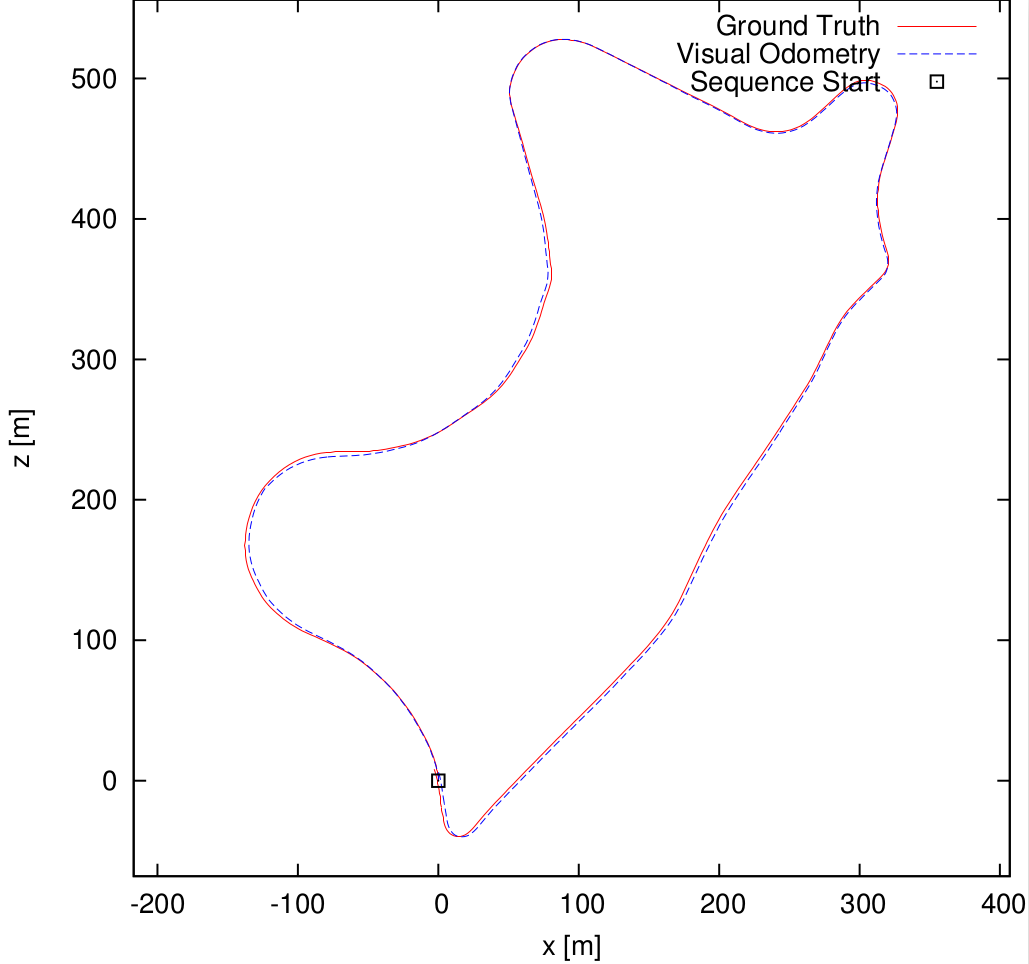
## Results
Visual Odometry results for two sequences from the KITTI dataset.
 [](https://www.youtube.com/watch?v=EFFH1OTh_IQ)
## Dependencies:
```
OpenCV2.4
PCL
g2o
```
## Building Project in terminal:
```
mkdir build
cd build
cmake ..
make
```
## Running project
```
cd
./vo PATH_TO_LEFT_IMAGE_SET_DIRECTORY PATH_TO_RIGHT_IMAGE_SET_DIRECTORY PATH_TO_YAML_FILE
```
## Contributors
```
Xiaoyu Zhou @ucsdxiaoyuzhou
Akshaya Purohit @akshayapurohit23
Bolun Zhang @zblzcj
Leonard Melvix @lmelvix
```
[](https://www.youtube.com/watch?v=EFFH1OTh_IQ)
## Dependencies:
```
OpenCV2.4
PCL
g2o
```
## Building Project in terminal:
```
mkdir build
cd build
cmake ..
make
```
## Running project
```
cd
./vo PATH_TO_LEFT_IMAGE_SET_DIRECTORY PATH_TO_RIGHT_IMAGE_SET_DIRECTORY PATH_TO_YAML_FILE
```
## Contributors
```
Xiaoyu Zhou @ucsdxiaoyuzhou
Akshaya Purohit @akshayapurohit23
Bolun Zhang @zblzcj
Leonard Melvix @lmelvix
```