

代码拉取完成,页面将自动刷新
同步操作将从 程序员充电站/LeetCode-Py 强制同步,此操作会覆盖自 Fork 仓库以来所做的任何修改,且无法恢复!!!
确定后同步将在后台操作,完成时将刷新页面,请耐心等待。
图的结构比较复杂,我们需要表示顶点和边。一个图可能有任意多个(有限个)顶点,而且任何两个顶点之间都可能存在边。我们在实现图的存储时,重点需要关注边与顶点之间的关联关系,这是图的存储的关键。
图的存储可以通过「顺序存储结构」和「链式存储结构」来实现。其中顺序存储结构包括邻接矩阵和边集数组。链式存储结构包括邻接表、链式前向星、十字链表和邻接多重表。
接下来我们来介绍几个常用的图的存储结构。在下文中,我们约定用 $n$ 代表顶点数目,$m$ 代表边数目,$TD(v_i)$ 表示顶点 $v_i$ 的度。
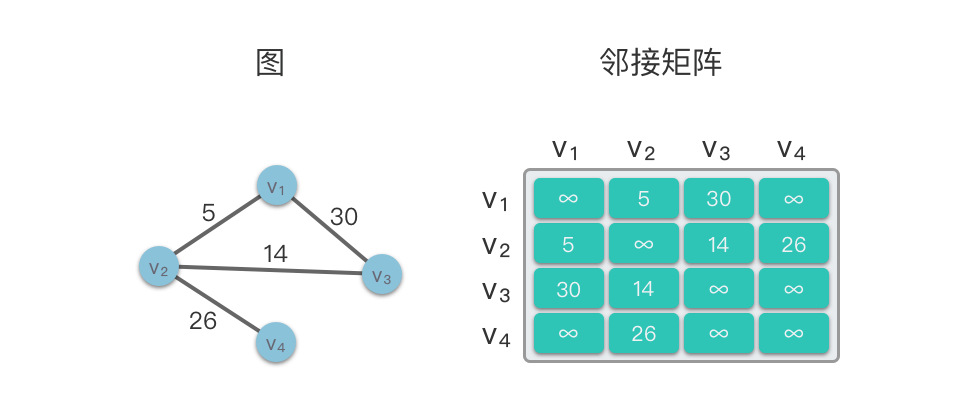
邻接矩阵(Adjacency Matrix):使用一个二维数组 $adj\underline{}matrix$ 来存储顶点之间的邻接关系。
- 对于无权图来说,如果 $adj\underline{}matrix[i][j]$ 为 $1$,则说明顶点 $v_i$ 到 $v_j$ 存在边,如果 $adj\underline{}matrix[i][j]$ 为 $0$,则说明顶点 $v_i$ 到 $v_j$ 不存在边。
- 对于带权图来说,如果 $adj\underline{}matrix[i][j]$ 为 $w$,并且 $w \ne \infty$(即
w != float('inf')),则说明顶点 $v_i$ 到 $v_j$ 的权值为 $w$。如果 $adj\underline{}matrix[i][j]$ 为 $\infty$(即float('inf')),则说明顶点 $v_i$ 到 $v_j$ 不存在边。
在下面的示意图中,左侧是一个无向图,右侧则是该无向图对应的邻接矩阵结构。
邻接矩阵的特点:
时间复杂度:
空间复杂度:$O(n^2)$。
class Graph: # 基本图类,采用邻接矩阵表示
# 图的初始化操作,ver_count 为顶点个数
def __init__(self, ver_count):
self.ver_count = ver_count # 顶点个数
self.adj_matrix = [[None for _ in range(ver_count)] for _ in range(ver_count)] # 邻接矩阵
# 判断顶点 v 是否有效
def __valid(self, v):
return 0 <= v <= self.ver_count
# 图的创建操作,edges 为边信息
def creatGraph(self, edges=[]):
for vi, vj, val in edges:
self.add_edge(vi, vj, val)
# 向图的邻接矩阵中添加边:vi - vj,权值为 val
def add_edge(self, vi, vj, val):
if not self.__valid(vi) or not self.__valid(vj):
raise ValueError(str(vi) + ' or ' + str(vj) + " is not a valid vertex.")
self.adj_matrix[vi][vj] = val
# 获取 vi - vj 边的权值
def get_edge(self, vi, vj):
if not self.__valid(vi) or not self.__valid(vj):
raise ValueError(str(vi) + ' or ' + str(vj) + " is not a valid vertex.")
return self.adj_matrix[vi][vj]
# 根据邻接矩阵打印图的边
def printGraph(self):
for vi in range(self.ver_count):
for vj in range(self.ver_count):
val = self.get_edge(vi, vj)
if val:
print(str(vi) + ' - ' + str(vj) + ' : ' + str(val))
graph = Graph(5)
edges = [[1, 2, 5],[2, 1, 5],[1, 3, 30],[3, 1, 30],[2, 3, 14],[3, 2, 14],[2, 4, 26], [4, 2, 26]]
graph.creatGraph(edges)
print(graph.get_edge(3, 4))
graph.printGraph()
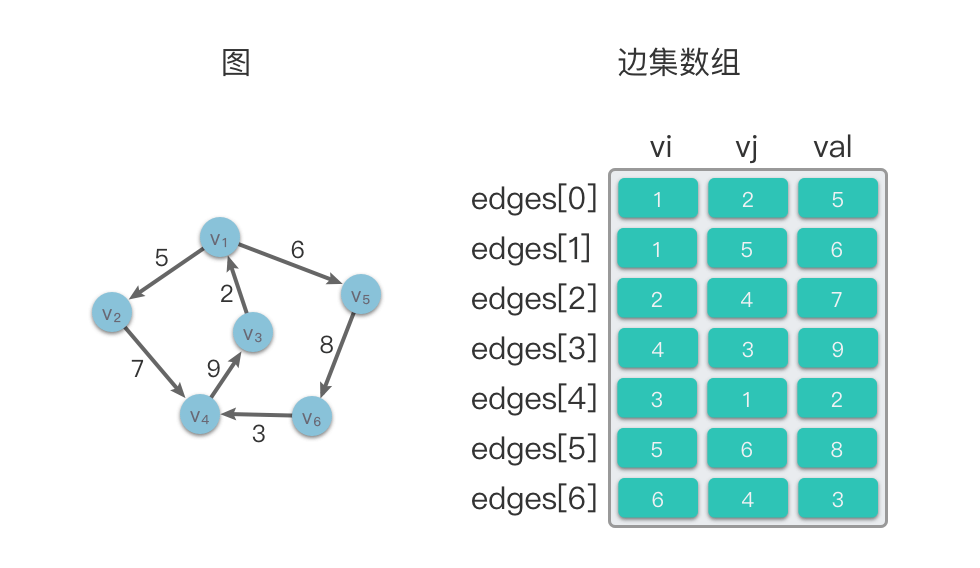
边集数组(Edgeset Array):使用一个数组来存储存储顶点之间的邻接关系。数组中每个元素都包含一条边的起点 $v_i$、终点 $v_j$ 和边的权值 $val$(如果是带权图)。
在下面的示意图中,左侧是一个有向图,右侧则是该有向图对应的边集数组结构。
边集数组的时间复杂度:
边集数组的空间复杂度:
采用边集数组计算节点的度或者查找某条边时,需要遍历整个边集数组,时间复杂度为 $O(m)$,m 是边的数量。除非特殊必要,很少用使用边集数组来存储图。
一般来说,边集数组适合那些对边依次进行处理的运算,不适合对顶点的运算和对任何一条边的运算。
class EdgeNode: # 边信息类
def __init__(self, vi, vj, val):
self.vi = vi # 边的起点
self.vj = vj # 边的终点
self.val = val # 边的权值
class Graph: # 基本图类,采用边集数组表示
def __init__(self):
self.edges = [] # 边数组
# 图的创建操作,edges 为边信息
def creatGraph(self, edges=[]):
for vi, vj, val in edges:
self.add_edge(vi, vj, val)
# 向图的边数组中添加边:vi - vj,权值为 val
def add_edge(self, vi, vj, val):
edge = EdgeNode(vi, vj, val) # 创建边节点
self.edges.append(edge) # 将边节点添加到边数组中
# 获取 vi - vj 边的权值
def get_edge(self, vi, vj):
for edge in self.edges:
if vi == edge.vi and vj == edge.vj:
val = edge.val
return val
return None
# 根据边数组打印图
def printGraph(self):
for edge in self.edges:
print(str(edge.vi) + ' - ' + str(edge.vj) + ' : ' + str(edge.val))
graph = Graph()
edges = [[1, 2, 5],[1, 5, 6],[2, 4, 7],[4, 3, 9],[3, 1, 2],[5, 6, 8],[6, 4, 3]]
graph.creatGraph(edges)
print(graph.get_edge(3, 4))
graph.printGraph()
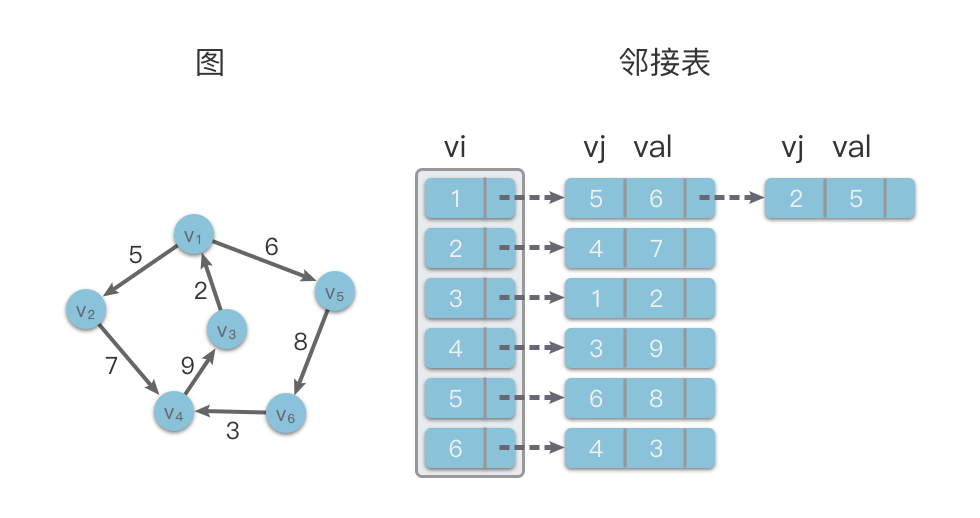
邻接表(Adjacency List):使用顺序存储和链式存储相结合的存储结构来存储图的顶点和边。其数据结构包括两个部分,其中一个部分是数组,主要用来存放顶点的数据信息,另一个部分是链表,用来存放边信息。
在邻接表的存储方法中,对于对图中每个顶点 $v_i$ 建立一个线性链表,把所有邻接于 $v_i$ 的顶点链接到单链表上。这样对于具有 n 个顶点的图而言,其邻接表结构由 n 个线性链表组成。
然后我们在每个顶点前边设置一个表头节点,称之为「顶点节点」。每个顶点节点由「顶点域」和「指针域」组成。其中顶点域用于存放某个顶点的数据信息,指针域用于指出该顶点第 1 条边所对应的链节点。
为了方便随机访问任意顶点的链表,通常我们会使用一组顺序存储结构(数组)存储所有「顶点节点」部分,顺序存储结构(数组)的下标表示该顶点在图中的位置。
在下面的示意图中,左侧是一个有向图,右侧则是该有向图对应的邻接表结构。
邻接表的时间复杂度:
邻接表的空间复杂度:
class EdgeNode: # 边信息类
def __init__(self, vj, val):
self.vj = vj # 边的终点
self.val = val # 边的权值
self.next = None # 下一条边
class VertexNode: # 顶点信息类
def __init__(self, vi):
self.vi = vi # 边的起点
self.head = None # 下一个邻接点
class Graph:
def __init__(self, ver_count):
self.ver_count = ver_count
self.vertices = []
for vi in range(ver_count):
vertex = VertexNode(vi)
self.vertices.append(vertex)
# 判断顶点 v 是否有效
def __valid(self, v):
return 0 <= v <= self.ver_count
# 图的创建操作,edges 为边信息
def creatGraph(self, edges=[]):
for vi, vj, val in edges:
self.add_edge(vi, vj, val)
# 向图的邻接表中添加边:vi - vj,权值为 val
def add_edge(self, vi, vj, val):
if not self.__valid(vi) or not self.__valid(vj):
raise ValueError(str(vi) + ' or ' + str(vj) + " is not a valid vertex.")
vertex = self.vertices[vi]
edge = EdgeNode(vj, val)
edge.next = vertex.head
vertex.head = edge
# 获取 vi - vj 边的权值
def get_edge(self, vi, vj):
if not self.__valid(vi) or not self.__valid(vj):
raise ValueError(str(vi) + ' or ' + str(vj) + " is not a valid vertex.")
vertex = self.vertices[vi]
cur_edge = vertex.head
while cur_edge:
if cur_edge.vj == vj:
return cur_edge.val
cur_edge = cur_edge.next
return None
# 根据邻接表打印图的边
def printGraph(self):
for vertex in self.vertices:
cur_edge = vertex.head
while cur_edge:
print(str(vertex.vi) + ' - ' + str(cur_edge.vj) + ' : ' + str(cur_edge.val))
cur_edge = cur_edge.next
graph = Graph(7)
edges = [[1, 2, 5],[1, 5, 6],[2, 4, 7],[4, 3, 9],[3, 1, 2],[5, 6, 8],[6, 4, 3]]
graph.creatGraph(edges)
print(graph.get_edge(3, 4))
graph.printGraph()
链式前向星(Linked Forward Star):也叫做静态邻接表,实质上就是使用静态链表实现的邻接表。链式前向星将边集数组和邻接表相结合,可以快速访问一个节点所有的邻接点,并且使用很少的额外空间。
链式前向星采用了一种静态链表的存储方式,可以说是目前建图和遍历效率最高的存储方式。
链式前向星由两种数据结构组成:
edges,其中 edges[i] 表示第 i 条边。edges[i].vj 表示第 i 条边的终止点,edges[i].val 表示第 i 条边的权值,edges[i].next 表示与第 i 条边同起始点的下一条边的存储位置。head,其中 head[i] 存储以顶点 i 为起始点的第 1 条边在数组 edges 中的下标。链式前向星其实并没有改变边集数组原来的存储数学,只是利用 head 数组构成静态链表,建立了顶点 $v_i$ 和顶点 $v_i$ 所连第 1 条边的关系。
在下面的示意图中,左侧是一个有向图,右侧则是该有向图对应的链式前向星结构。
如果需要在该图中遍历顶点 $v_1$ 的所有边,则步骤如下:
1 条边在数组 edges 中的下标,即 index = head[1] = 1 。则在 edges 数组中找到与顶点 $v_1$ 相连的第 1 条边为 edges[1],即 $\langle v_1, v_5 \rangle$,权值为 6。index = self.edges[1].next = 0 ,则在 edges 数组中找到与顶点 $v_1$ 相连的第 2 条边 edges[0],即 $\langle v_1, v_2 \rangle$,权值为 5。index = self.edges[0].next = -1,则不存在其余边,查找结束。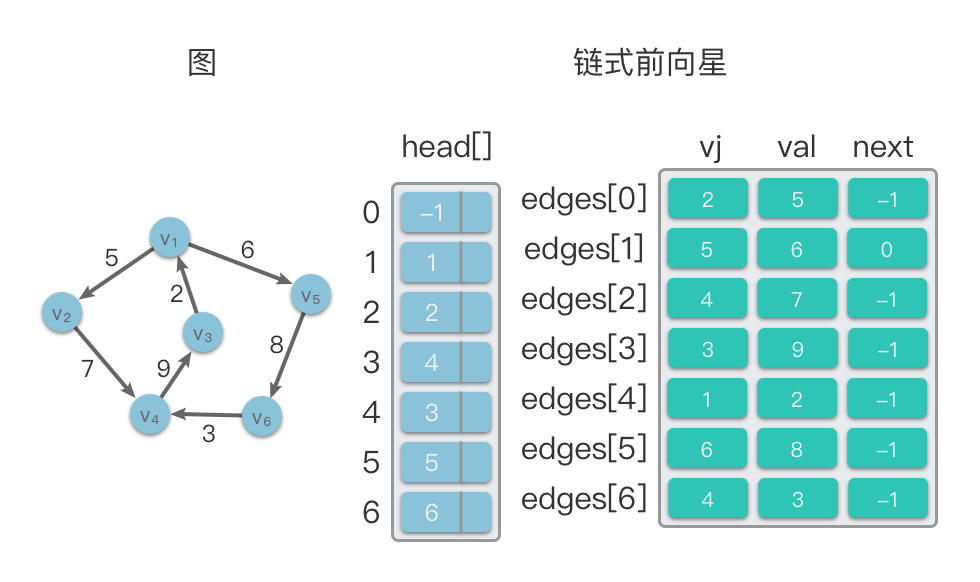
链式前向星的时间复杂度:
链式前向星的空间复杂度:
class EdgeNode: # 边信息类
def __init__(self, vj, val):
self.vj = vj # 边的终点
self.val = val # 边的权值
self.next = None # 下一条边
class Graph:
def __init__(self, ver_count, edge_count):
self.ver_count = ver_count # 顶点个数
self.edge_count = edge_count # 边个数
self.head = [-1 for _ in range(ver_count)] # 头节点数组
self.edges = [] # 边集数组
# 判断顶点 v 是否有效
def __valid(self, v):
return 0 <= v <= self.ver_count
# 图的创建操作,edges 为边信息
def creatGraph(self, edges=[]):
for i in range(len(edges)):
vi, vj, val = edges[i]
self.add_edge(i, vi, vj, val)
# 向图的边集数组中添加边:vi - vj,权值为 val
def add_edge(self, index, vi, vj, val):
if not self.__valid(vi) or not self.__valid(vj):
raise ValueError(str(vi) + ' or ' + str(vj) + " is not a valid vertex.")
edge = EdgeNode(vj, val) # 构造边节点
edge.next = self.head[vi] # 边节点的 next 指向原来首指针
self.edges.append(edge) # 边集数组添加该边
self.head[vi] = index # 首指针指向新加边所在边集数组的下标
# 获取 vi - vj 边的权值
def get_edge(self, vi, vj):
if not self.__valid(vi) or not self.__valid(vj):
raise ValueError(str(vi) + ' or ' + str(vj) + " is not a valid vertex.")
index = self.head[vi] # 得到顶点 vi 相连的第一条边在边集数组的下标
while index != -1: # index == -1 时说明 vi 相连的边遍历完了
if vj == self.edges[index].vj: # 找到了 vi - vj 边
return self.edges[index].val # 返回 vi - vj 边的权值
index = self.edges[index].next # 取顶点 vi 相连的下一条边在边集数组的下标
return None # 没有找到 vi - vj 边
# 根据链式前向星打印图的边
def printGraph(self):
for vi in range(self.ver_count): # 遍历顶点 vi
index = self.head[vi] # 得到顶点 vi 相连的第一条边在边集数组的下标
while index != -1: # index == -1 时说明 vi 相连的边遍历完了
print(str(vi) + ' - ' + str(self.edges[index].vj) + ' : ' + str(self.edges[index].val))
index = self.edges[index].next # 取顶点 vi 相连的下一条边在边集数组的下标
graph = Graph(7, 7)
edges = [[1, 2, 5],[1, 5, 6],[2, 4, 7],[4, 3, 9],[3, 1, 2],[5, 6, 8],[6, 4, 3]]
graph.creatGraph(edges)
print(graph.get_edge(4, 3))
print(graph.get_edge(4, 5))
graph.printGraph()
在 Python 中,通过哈希表(字典)可以轻松的实现邻接表。哈希表实现邻接表包含两个哈希表:第一个哈希表主要用来存放顶点的数据信息,哈希表的键是顶点,值是该点所有邻接边构成的另一个哈希表。另一个哈希表用来存放顶点相连的边信息,哈希表的键是边的终点,值是边的权重。
哈希表实现邻接表的时间复杂度:
哈希表实现邻接表的空间复杂度:
class VertexNode: # 顶点信息类
def __init__(self, vi):
self.vi = vi # 顶点
self.adj_edges = dict() # 顶点的邻接边
class Graph:
def __init__(self):
self.vertices = dict() # 顶点
# 图的创建操作,edges 为边信息
def creatGraph(self, edges=[]):
for vi, vj, val in edges:
self.add_edge(vi, vj, val)
# 向图中添加节点
def add_vertex(self, vi):
vertex = VertexNode(vi)
self.vertices[vi] = vertex
# 向图的邻接表中添加边:vi - vj,权值为 val
def add_edge(self, vi, vj, val):
if vi not in self.vertices:
self.add_vertex(vi)
if vj not in self.vertices:
self.add_vertex(vj)
self.vertices[vi].adj_edges[vj] = val
# 获取 vi - vj 边的权值
def get_edge(self, vi, vj):
if vi in self.vertices and vj in self.vertices[vi].adj_edges:
return self.vertices[vi].adj_edges[vj]
return None
# 根据邻接表打印图的边
def printGraph(self):
for vi in self.vertices:
for vj in self.vertices[vi].adj_edges:
print(str(vi) + ' - ' + str(vj) + ' : ' + str(self.vertices[vi].adj_edges[vj]))
graph = Graph()
edges = [[1, 2, 5],[1, 5, 6],[2, 4, 7],[4, 3, 9],[3, 1, 2],[5, 6, 8],[6, 4, 3]]
graph.creatGraph(edges)
print(graph.get_edge(3, 4))
graph.printGraph()
图论和图论算法在计算机科学中扮演这很重要的角色,它提供了对很多问题都有效的一种简单而系统的建模方式。很多实际问题都可以转化为图论问题,然后使用图论的景点算法加以解决。例如:
常见的图论问题应用大概可以分为以下几类:图的遍历问题、图的连通性问题、图的生成树问题、图的最短路径问题、图的网络流问题、二分图问题 等等。
图的遍历:与树的遍历类似,图的遍历指的是从图的某一个顶点出发,按照某种搜索方式对图中的所有节点都仅访问一次。
图的遍历是求解图的连通性问题、拓扑排序和求关键路径等算法的基础。
根据搜索方式的不同,可以将图的遍历分为「深度优先搜索」和「广度优先搜索」。
我们在「2.3 连通图和非连通图」中提到过「2.3.1 连通无向图和连通分量」和「2.3.2 强连通有向图和强连通分量」。
在无向图中,图的连通性问题主要包括:求无向图的连通分量、求点双连通分量(找割点)、求边双连通分量(找桥)、全局最小割问题 等等。
在有向图中,图的连通性问题主要包括:求有向图的强连通分量、最小点基、最小权点基、2-SAT 问题 等等。
图的生成树(Spanning Tree):如果连通图 G 的一个子图是一棵包含图 G 所有顶点的树,则称该子图为 G 的生成树。生成树是连通图的包含图中的所有顶点的极小连通子图。图的生成树不惟一。从不同的顶点出发进行遍历,可以得到不同的生成树。
图的生成树问题主要包括:最小生成树问题、次小生成树问题 和 有向图的最小树形图问题 等等。
图的最短路径问题:如果用带权图来表示真实的交通、物流或社交网络,则边的权重可能代表交通运输费、距离或者熟悉程度。此时我们会考虑两个不同顶点之间的最短路径有多长,这一类问题统称为最短路径。并且我们称路径上的第一个顶点为源点,最后一个顶点为终点。
按照源点数目的不同,可以将图的最短路径问题分为 单源最短路径问题 和 多源最短路径问题。
单元最短路径问题 的求解还是 差分约束系统问题 的基础。
除此之外,在实际应用中,有时候除了需要知道最短路径外,还需要知道次最短路径或者第三最短路径。这样的多条最短路径问题称为 k 最短路径问题。
图的网络流:这里的「网络」指的是:带权的连通有向图。该有向图中的每条边都有一个权值(也称为容量值),当顶点之间不存在边时,两点之间的容量为 0。并且该有向图中有两个特殊的顶点:源点 $s$ 和汇点 $t$。
这里的「流」指的是:网络上的流。如果把网络想象成一个自来水管道网络,那么流就是其中流动的水。每条边的方向表示允许的流向,边上的权值表示这条边允许通过的最大流量,也就是说每条边上的流都不能超过它的容量。并且对于除了源点 $s$ 和汇点 $t$ 外的所有点(即中继点),流入的流量都等于流出的流量。
图的网络流中最常见的问题就是 网络最大流问题。其次还有 网络最小费用最大流问题、网络最小割问题。
二分图:设 $G = (V, E)$ 是一个无向图,如果顶点 $V$ 可以分为两个互不相交的子集 $(A, B)$,并且图中每条边 $(u, v)$ 所关联的两个顶点 $u$ 和 $v$ 分别属于这两个不同的顶点集(即 $u \in A, v \in B$),则称图 $G$ 是一个二分图。
二分图中的常见问题有:二分图最大匹配问题、二分图最大权匹配问题、二分图多重匹配问题。
先来介绍一下匹配的概念:在二分图中,一个匹配就是一个边的集合,其中任意两条边之间都没有公共节点。
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。







