

代码拉取完成,页面将自动刷新
脚本功能的介绍,见.\reference\船体运动仿真.docx
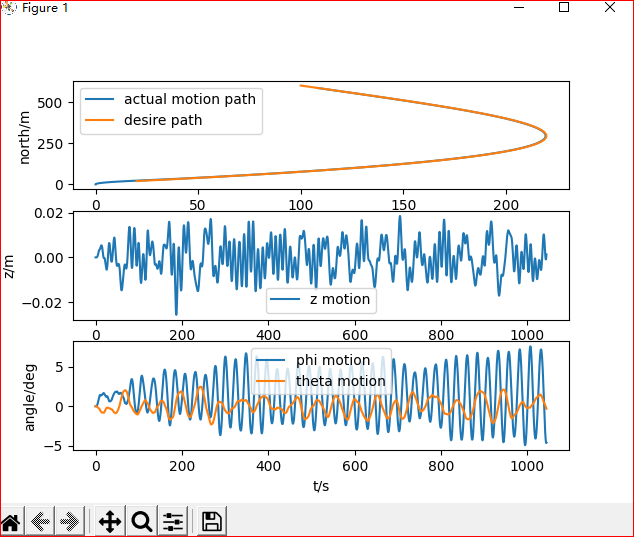
上图使用了.\out_interface\boat.ini中[boat_a]船进行路径跟踪。由于引入了风浪干扰,因此存在垂荡Z和roll pitch变化,并用曲线展示。
你可以按你的喜好改变船型为[boat_b]。这样的话,你需要对应修改.\path_plan\pathPlan.py文件,对uuv_s中的控制参数进行调参或是换为其他控制器。
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。





