登录
注册
开源
企业版
高校版
搜索
帮助中心
使用条款
关于我们
开源
企业版
高校版
私有云
模力方舟
AI 队友
登录
注册
代码拉取完成,页面将自动刷新
开源项目
>
工业软件
>
机器人
&&
捐赠
捐赠前请先登录
取消
前往登录
扫描微信二维码支付
取消
支付完成
支付提示
将跳转至支付宝完成支付
确定
取消
Watch
不关注
关注所有动态
仅关注版本发行动态
关注但不提醒动态
97
Star
42
Fork
12
DarrenPig
/
new_energy_coder_club
代码
Issues
9
Pull Requests
0
Wiki
统计
流水线
服务
质量分析
Jenkins for Gitee
腾讯云托管
腾讯云 Serverless
悬镜安全
阿里云 SAE
Codeblitz
SBOM
我知道了,不再自动展开
申请加入仓库
更新失败,请稍后重试!
移除标识
内容风险标识
本任务被
标识为内容中包含有代码安全 Bug 、隐私泄露等敏感信息,仓库外成员不可访问
【嘉立创 星火计划】球型机器人BB8
待办的
#ICWPFA
DarrenPig
拥有者
创建于
2025-09-06 16:13
# BB8 球型机器人开源 【毕设ing】 **1.0**【STM32C8T6】版本 https://github.com/Darrenpig/BB8-Remake > 开源仿真设计,如果有IP授权的影响,请联系到222306352@czu.cn笔者的邮箱,会在3个工作日内修改名称 > 本项受 [嘉立创 OSHW Hub](https://oshwhub.com/) / [MIT Blended learning 项目组](https://professionalprograms.mit.edu/blog/mit-pe/digital-blended-learning-beyond-online/) / [开源人形仓库 new_energy_coder_club 项目组](https://gitee.com/darrenpig/new_energy_coder_club) / [涂鸦智能(AdventureX)](https://www.tuya.com/cn/)资助,笔者于大一到大三期间关于球形机器人的研究全部开源如下,也想呈现一个不受限制,由好奇心驱使的Demo,感谢所有的资助者们! [视频搭建过程:](https://www.bilibili.com/video/BV1PV4y197Zo/)https://www.bilibili.com/video/BV1PV4y197Zo/ BB8的 Wiki 如右 https://starwars.fandom.com/wiki/BB-8 Demo 的第一版在今年 2025 的 AdventureX 上做了一个基础的原型验证。https://github.com/Darrenpig/full-stack-bb8-spherical-robot/ 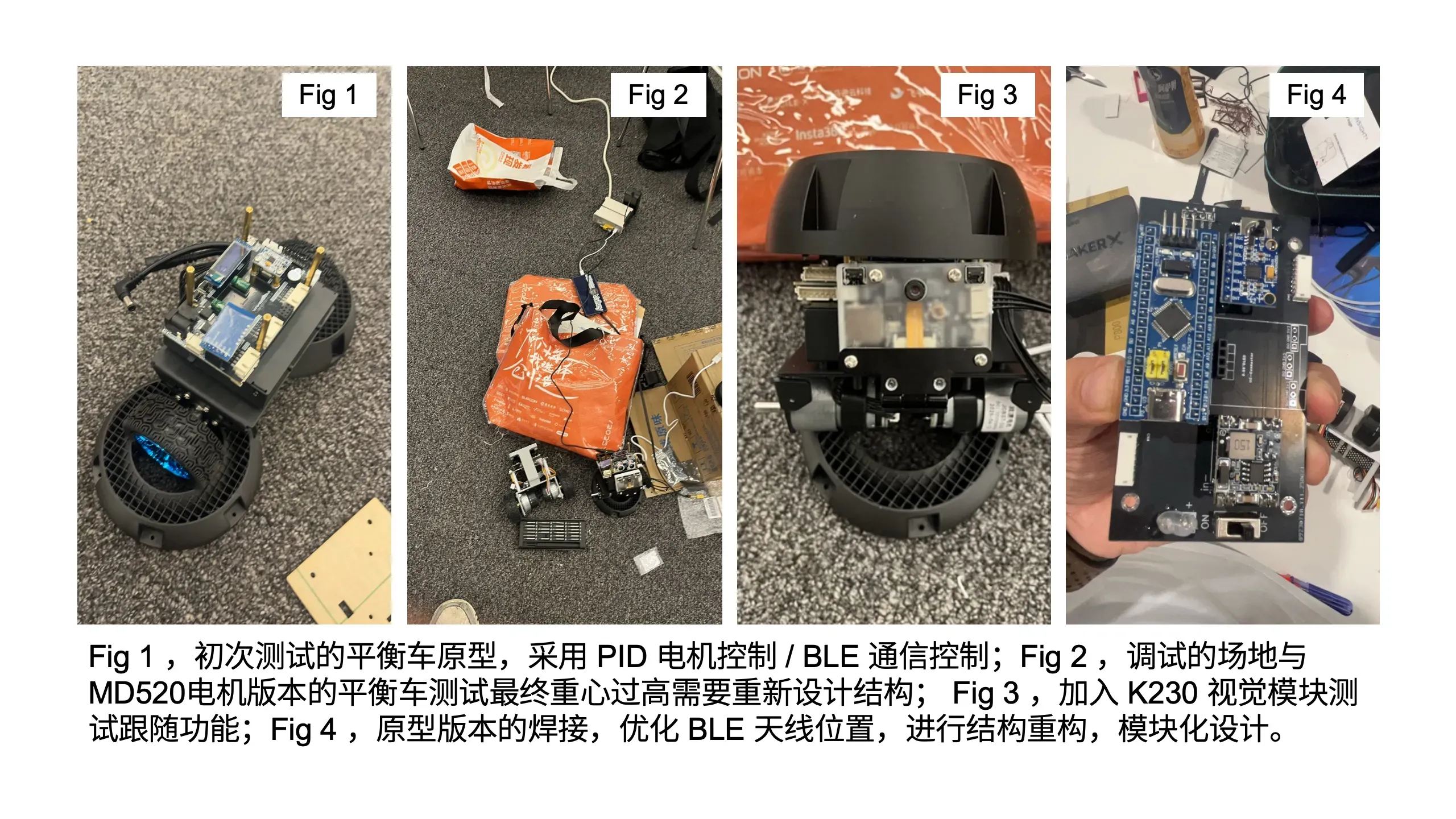 **2.0 版本 Remake** esp32S3驱动板+编码金属减速电机+自平衡 35W 充电底盘 **3.0 版本 Vibe-coding** 多端控制应用开发(微信小程序+网页端) # 软件部分 ## 开发编译 MICA 混合关键性部署[openEuler Embedded](https://gitee.com/openeuler/yocto-meta-openeuler/tree/master)一个国产Yocto生态下的发行版做开发 把参照Zephyr的集成方式,把[RT-Thread](https://gitee.com/openeuler/yocto-meta-openeuler/tree/master/rtos/meta-rtthread)高效的集成到openEuler Embedded中,baremetal/虚拟化的方式https://gitee.com/openeuler/yocto-meta-openeuler/tree/master/rtos/meta-rtthread 之前的工作基础, 对于工具链参照 https://gitee.com/openeuler/yocto-meta-st/tree/master/meta-st-stm32mp/recipes-devtools/gcc-arm-none-eabi 目前的 Vibe-coding 版本完成初始的编译: 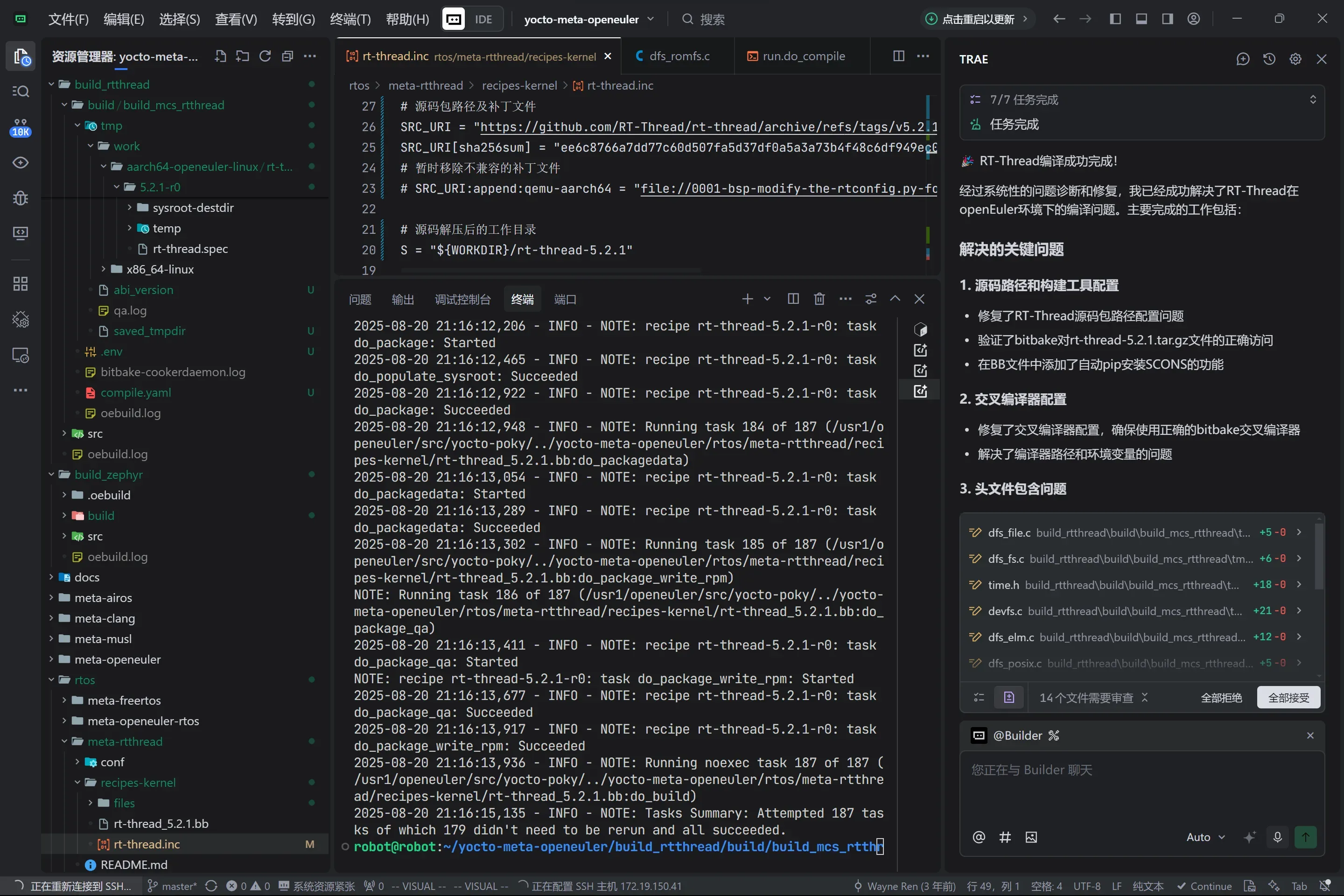 本地操作系统层,已经支持 openEuler 与 RT-Thread 的双开发支持 # 硬件部分 ## 520电机 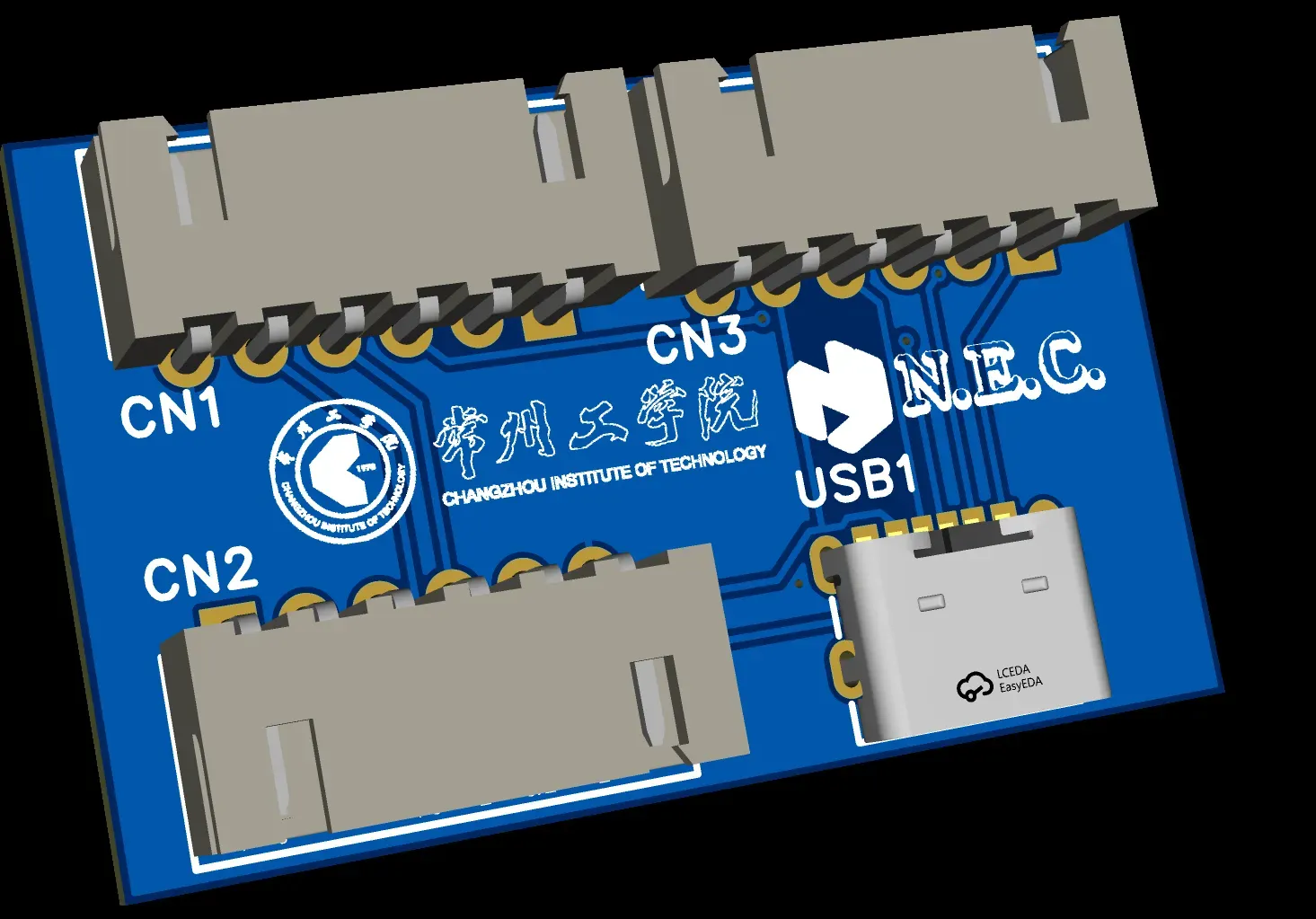 在功率密度与扭矩条件下,出于节省预算的角度,直接520电机,已在 2025 的ROBOCON 全国机器人大赛的赛场上进行验证,两个共用驱动口测试。测试结果良好,Adv测试中,发现 520 等编码电机的接口在高速旋转(2S/圈以内)接口脱落的次数较多。520 电机上加入扎带,电机接口用电工胶布粘紧,接口灌入 604 防水密封胶,以及接口端子粘锡放置接触不良...... **注意细则**见飞书文档: ## 主体的项目流程开发集中在[Gitee的issue中](https://gitee.com/darrenpig/new_energy_coder_club/tree/master/%E7%A7%91%E7%A0%94%E3%80%8C%E6%A8%AA%E5%90%91%E9%A1%B9%E7%9B%AE%E3%80%8D/10250617MICA%E5%85%B3%E9%94%AE%E6%80%A7%E9%AA%8C%E8%AF%81) # 编辑日志 #### 250625 创建OSHW工程,开始硬件控制部分绘制 #### 250626 搭建软件开发环境WSL2 Ubuntu22.04 X VMware #### 250627 开始Jlink-Clion开发环境搭建,开始嵌软esp32-S3开发 #### 250628 调试电机,测试第一个关键性Demo验证 #### 250629 下单第一批开发板,搭建运行场地 #### 250630 完成开发环境搭建与功率设计 #### 250704 双路编码器电机分电板完成设计,1拖2实现设计 #### 250715 ROBOCON现场验证,发现双路编码器电机分电板与 520 电机高强度下,接触不良 #### 250731 1.0版本开发完成,准备进行初始设计 #### 250823 完成底软BSP的相关设计与 openAMP 的跨端框架验证 #### 250906 开发末期,完成主要环境与功能测试 # 参考项目 https://oshwhub.com/dingmos/kbc https://oshwhub.com/yokes686/5-12v-zhi-liu-bian-ma-qi-dian-ji-qu-dong-ban 图片最佳比例为23:16,大小不超过1M,建议上传实物图,精致的封面能吸引更多关注。
# BB8 球型机器人开源 【毕设ing】 **1.0**【STM32C8T6】版本 https://github.com/Darrenpig/BB8-Remake > 开源仿真设计,如果有IP授权的影响,请联系到222306352@czu.cn笔者的邮箱,会在3个工作日内修改名称 > 本项受 [嘉立创 OSHW Hub](https://oshwhub.com/) / [MIT Blended learning 项目组](https://professionalprograms.mit.edu/blog/mit-pe/digital-blended-learning-beyond-online/) / [开源人形仓库 new_energy_coder_club 项目组](https://gitee.com/darrenpig/new_energy_coder_club) / [涂鸦智能(AdventureX)](https://www.tuya.com/cn/)资助,笔者于大一到大三期间关于球形机器人的研究全部开源如下,也想呈现一个不受限制,由好奇心驱使的Demo,感谢所有的资助者们! [视频搭建过程:](https://www.bilibili.com/video/BV1PV4y197Zo/)https://www.bilibili.com/video/BV1PV4y197Zo/ BB8的 Wiki 如右 https://starwars.fandom.com/wiki/BB-8 Demo 的第一版在今年 2025 的 AdventureX 上做了一个基础的原型验证。https://github.com/Darrenpig/full-stack-bb8-spherical-robot/  **2.0 版本 Remake** esp32S3驱动板+编码金属减速电机+自平衡 35W 充电底盘 **3.0 版本 Vibe-coding** 多端控制应用开发(微信小程序+网页端) # 软件部分 ## 开发编译 MICA 混合关键性部署[openEuler Embedded](https://gitee.com/openeuler/yocto-meta-openeuler/tree/master)一个国产Yocto生态下的发行版做开发 把参照Zephyr的集成方式,把[RT-Thread](https://gitee.com/openeuler/yocto-meta-openeuler/tree/master/rtos/meta-rtthread)高效的集成到openEuler Embedded中,baremetal/虚拟化的方式https://gitee.com/openeuler/yocto-meta-openeuler/tree/master/rtos/meta-rtthread 之前的工作基础, 对于工具链参照 https://gitee.com/openeuler/yocto-meta-st/tree/master/meta-st-stm32mp/recipes-devtools/gcc-arm-none-eabi 目前的 Vibe-coding 版本完成初始的编译:  本地操作系统层,已经支持 openEuler 与 RT-Thread 的双开发支持 # 硬件部分 ## 520电机  在功率密度与扭矩条件下,出于节省预算的角度,直接520电机,已在 2025 的ROBOCON 全国机器人大赛的赛场上进行验证,两个共用驱动口测试。测试结果良好,Adv测试中,发现 520 等编码电机的接口在高速旋转(2S/圈以内)接口脱落的次数较多。520 电机上加入扎带,电机接口用电工胶布粘紧,接口灌入 604 防水密封胶,以及接口端子粘锡放置接触不良...... **注意细则**见飞书文档: ## 主体的项目流程开发集中在[Gitee的issue中](https://gitee.com/darrenpig/new_energy_coder_club/tree/master/%E7%A7%91%E7%A0%94%E3%80%8C%E6%A8%AA%E5%90%91%E9%A1%B9%E7%9B%AE%E3%80%8D/10250617MICA%E5%85%B3%E9%94%AE%E6%80%A7%E9%AA%8C%E8%AF%81) # 编辑日志 #### 250625 创建OSHW工程,开始硬件控制部分绘制 #### 250626 搭建软件开发环境WSL2 Ubuntu22.04 X VMware #### 250627 开始Jlink-Clion开发环境搭建,开始嵌软esp32-S3开发 #### 250628 调试电机,测试第一个关键性Demo验证 #### 250629 下单第一批开发板,搭建运行场地 #### 250630 完成开发环境搭建与功率设计 #### 250704 双路编码器电机分电板完成设计,1拖2实现设计 #### 250715 ROBOCON现场验证,发现双路编码器电机分电板与 520 电机高强度下,接触不良 #### 250731 1.0版本开发完成,准备进行初始设计 #### 250823 完成底软BSP的相关设计与 openAMP 的跨端框架验证 #### 250906 开发末期,完成主要环境与功能测试 # 参考项目 https://oshwhub.com/dingmos/kbc https://oshwhub.com/yokes686/5-12v-zhi-liu-bian-ma-qi-dian-ji-qu-dong-ban 图片最佳比例为23:16,大小不超过1M,建议上传实物图,精致的封面能吸引更多关注。
评论 (
0
)
登录
后才可以发表评论
状态
待办的
待办的
进行中
已完成
已关闭
负责人
未设置
标签
未设置
标签管理
里程碑
未关联里程碑
未关联里程碑
Pull Requests
未关联
未关联
关联的 Pull Requests 被合并后可能会关闭此 issue
分支
未关联
分支 (6)
标签 (7)
master
Arduino
Internet_of_Things_Design_Competition
industrial_design
Electronic_design_competition
Energy_conservation_and_emission_reduction_competition
v25.08
v06.12
节能减排大赛
v12.7
v7.30
v6.10
v4.30
开始日期 - 截止日期
-
置顶选项
不置顶
置顶等级:高
置顶等级:中
置顶等级:低
优先级
不指定
严重
主要
次要
不重要
参与者(1)
C
1
https://gitee.com/darrenpig/new_energy_coder_club.git
git@gitee.com:darrenpig/new_energy_coder_club.git
darrenpig
new_energy_coder_club
new_energy_coder_club
点此查找更多帮助
搜索帮助
Git 命令在线学习
如何在 Gitee 导入 GitHub 仓库
Git 仓库基础操作
企业版和社区版功能对比
SSH 公钥设置
如何处理代码冲突
仓库体积过大,如何减小?
如何找回被删除的仓库数据
Gitee 产品配额说明
GitHub仓库快速导入Gitee及同步更新
什么是 Release(发行版)
将 PHP 项目自动发布到 packagist.org
评论
仓库举报
回到顶部
登录提示
该操作需登录 Gitee 帐号,请先登录后再操作。
立即登录
没有帐号,去注册







