代码拉取完成,页面将自动刷新

同步操作将从 CodeJason/Arduino-SimpleFOC 强制同步,此操作会覆盖自 Fork 仓库以来所做的任何修改,且无法恢复!!!
确定后同步将在后台操作,完成时将刷新页面,请耐心等待。
![]()
![]()
![]()
Proper low-cost and low-power FOC supporting boards are very hard to find today and even may not exist. Even harder to find is a stable and simple FOC algorithm code for BLDC and Stepper motors capable of running on Arduino devices. Therefore this is an attempt to:
NEW RELEASE 📢: SimpleFOClibrary v2.0.2
- Arduino MEGA 2560 support
- OSC example project by @runger1101001
- floating point bug - open loop velocity by @ATILIUS-REGULUS
SimpleFOClibrary v2.0.1
- ESP32 bugfix
- frequency setting
- pwm resolution
- 2PWM stepper class added
StepperMotor2PWM- some refactoring of examples


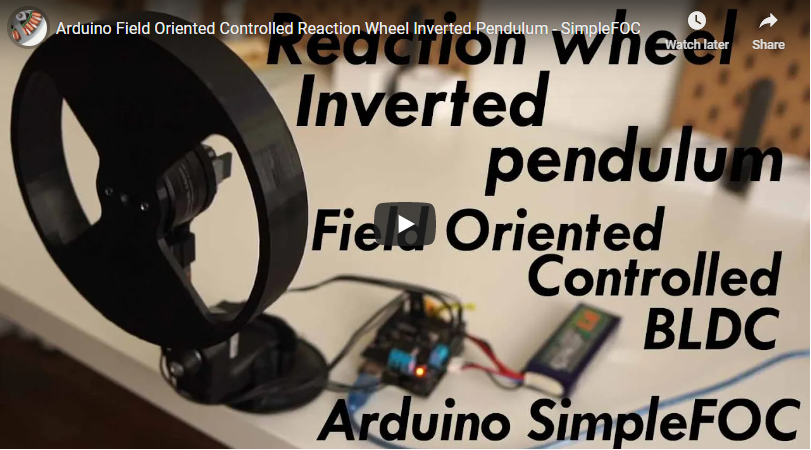
This video demonstrates the SimpleFOClibrary basic usage, electronic connections and shows its capabilities.
Depending on if you want to use this library as the plug and play Arduino library or you want to get insight in the algorithm and make changes there are two ways to install this code.
The simplest way to get hold of the library is directly by using Arduino IDE and its integrated Library Manager.
Tools > Manage Libraries....Simple FOC library and install the latest version.File > Examples > Simple FOC.Clone or Download > Download ZIP.Arduino Libraries folder. Windows: Documents > Arduino > libraries.File > Examples > Simple FOC.cd #Arduino libraries folder
git clone https://github.com/simplefoc/Arduino-FOC.git
File > Examples > Simple FOC.For those willing to experiment and to modify the code I suggest using the minimal project builder minimal branch.
This code is completely independent and you can run it as any other Arduino Sketch without the need for any libraries.
All you need to do is:
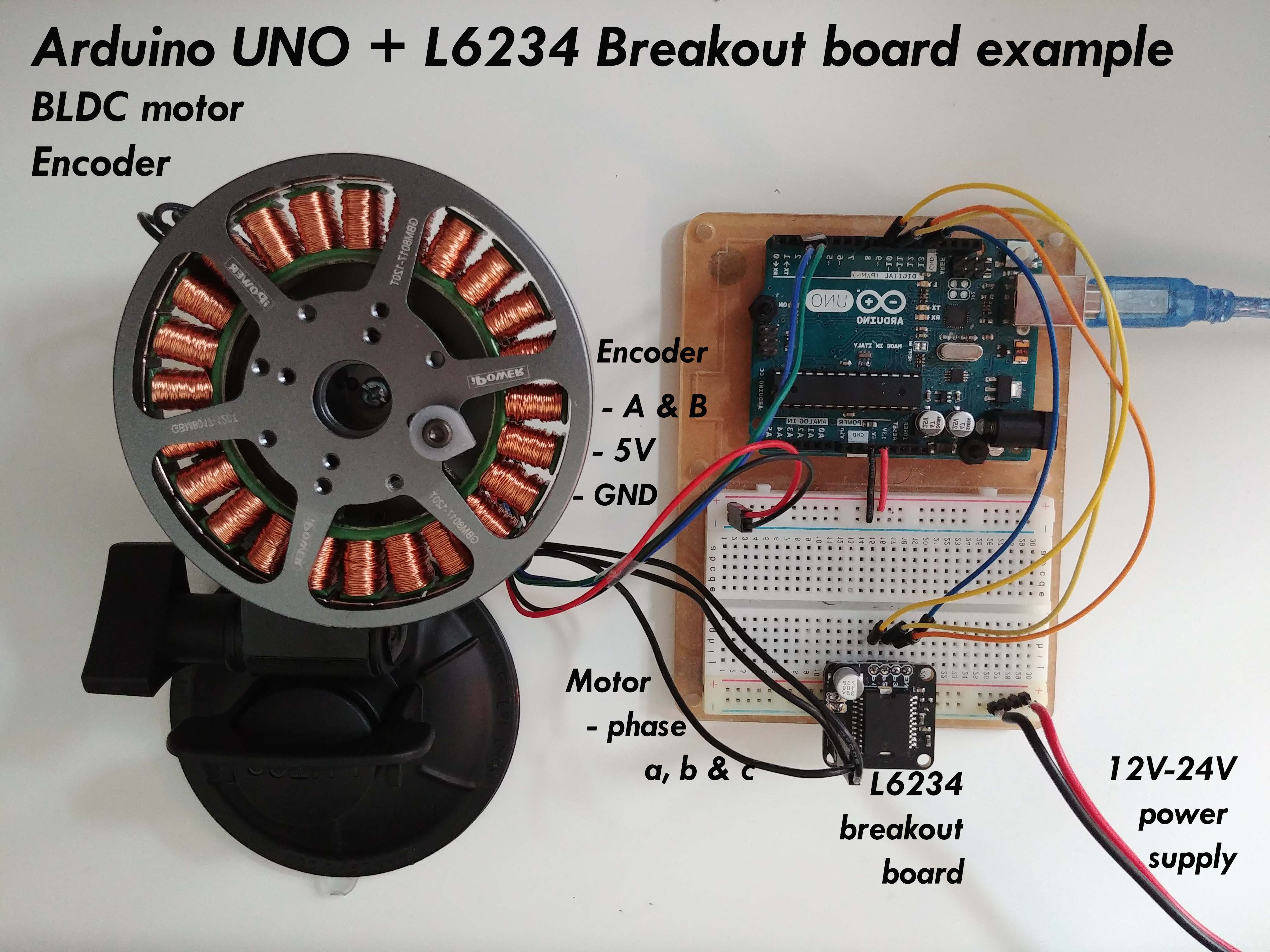
This is a simple Arduino code example implementing the velocity control program of a BLDC motor with encoder.
NOTE: This program uses all the default control parameters.
#include <SimpleFOC.h>
// BLDCMotor( pole_pairs )
BLDCMotor motor = BLDCMotor(11);
// BLDCDriver( pin_pwmA, pin_pwmB, pin_pwmC, enable (optional) )
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 10, 11, 8);
// Encoder(pin_A, pin_B, CPR)
Encoder encoder = Encoder(2, 3, 2048);
// channel A and B callbacks
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
void setup() {
// initialize encoder hardware
encoder.init();
// hardware interrupt enable
encoder.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&encoder);
// power supply voltage [V]
driver.voltage_power_supply = 12;
// initialise driver hardware
driver.init();
// link driver
motor.linkDriver(&driver);
// set control loop type to be used
motor.controller = ControlType::velocity;
// initialize motor
motor.init();
// align encoder and start FOC
motor.initFOC();
}
void loop() {
// FOC algorithm function
motor.loopFOC();
// velocity control loop function
// setting the target velocity or 2rad/s
motor.move(2);
}
You can find more details in the SimpleFOC documentation.
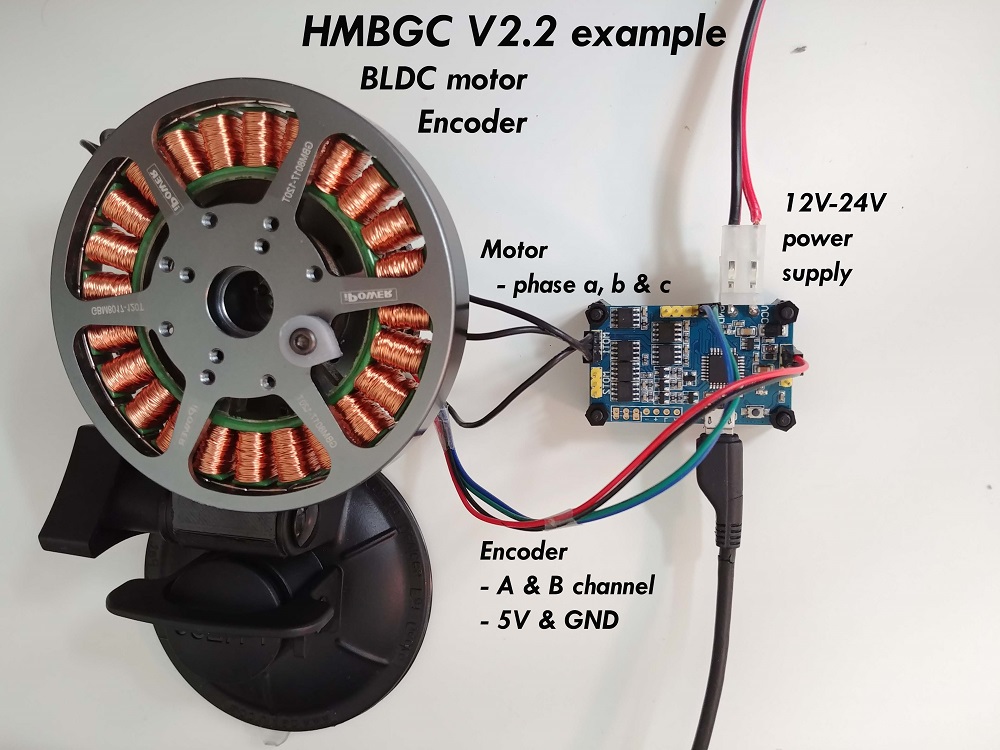
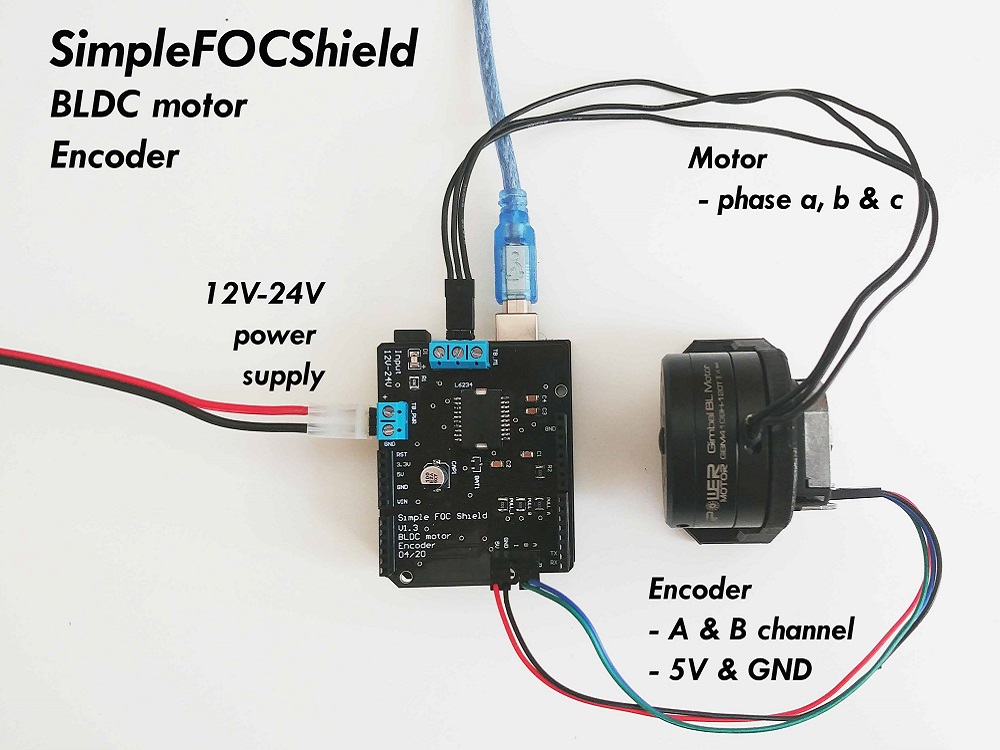
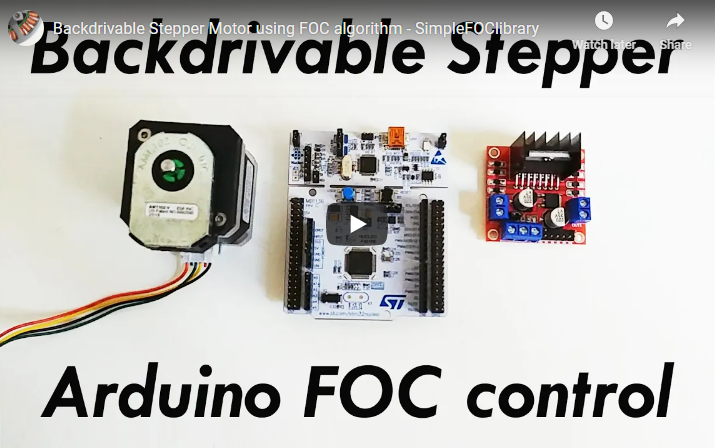
Here are some of the SimpleFOClibrary and SimpleFOCShield application examples.


Find out more information about the Arduino SimpleFOC project in docs website
| Branch | Description | Status |
|---|---|---|
| master | Stable and tested library version | |
| dev | Development library version | |
| minimal | Minimal Arduino example with integrated library |
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。