

代码拉取完成,页面将自动刷新

Prometheus是希腊神话中最具智慧的神明之一,希望本项目能为无人机研发带来无限的智慧与光明。
Prometheus是一套开源的自主无人机软件平台,为无人机的智能与自主飞行提供全套解决方案。本项目基于PX4开源飞控固件,旨在为PX4开发者配套成熟可用的机载电脑端程序,提供更加简洁快速的开发体验。目前已集成建图、定位、规划、控制及目标检测等模块,并配套有Gazebo仿真测试代码。
本项目依托于阿木实验室运营,开发及维护团队: 开发成员介绍 。
开源项目,维护不易,还烦请点一个star收藏

如何交流与本项目有关问题:
Promehteus仿真入门视频: B站搜索“阿木社区”,传送门: https://space.bilibili.com/432575320/channel/detail?cid=168428
Promehteus自主无人机直播课: B站搜索“阿木社区”,定期免费开课。往期录播请戳这里。
Promehteus自主无人机二次开发课程: 本课程偏重本项目中的基础知识和操作实践,适合本项目入门者。 课程报名请戳这里。
Prometheus二次开发平台: Prometheus 450第三代正式发布!
其他配套硬件:机架、机载电脑、双目、激光雷达等无人机二次开发硬件请关注 阿木实验室淘宝店 或 阿木实验室京东旗舰店。
项目合作、无人机软硬件定制,请添加微信“yanyue199506”(备注消息:Prometheus定制)。
奖励使用Prometheus进行实验并发表相关论文的学生科研工作者。
@misc{Prometheus, author = "Amovlab", title = "Prometheus autonomous UAV opensource project", howpublished = "\url{https://github.com/amov-lab/Prometheus }", }
奖励为Prometheus提供新功能或帮忙进行测试的学生开发者。
详情请戳这里 !
RGBD相机建图
3D激光雷达建图(暂无演示图片)
局部规划(APF)

全局规划(A star)

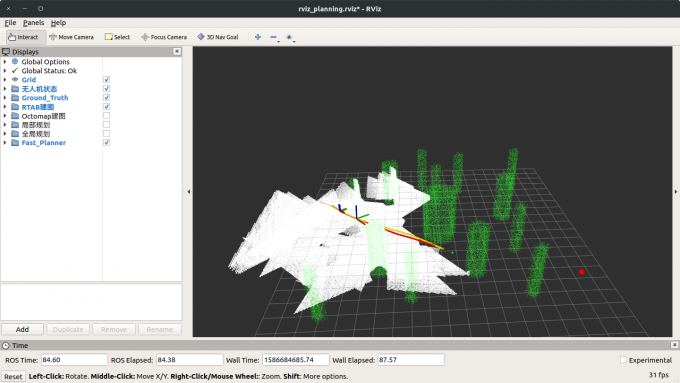
轨迹优化(Fast_Planner)
外环控制器二次开发
多机编队飞行(集中式或分布式控制)


圆形穿越
颜色巡线
数字识别
KCF框选追踪

YOLO通用目标检测(暂缺演示图)
移动平台自主降落
无人机+无人车协同控制
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。