

代码拉取完成,页面将自动刷新
![]()

![]()

![]()
Cupoch is a library that implements rapid 3D data processing for robotics using CUDA.
The goal of this library is to implement fast 3D data computation in robot systems. For example, it has applications in SLAM, collision avoidance, path planning and tracking. This repository is based on Open3D.
This software is tested under 64 Bit Ubuntu Linux 18.04 and CUDA 10.1/10.2. You can install cupoch using pip.
pip install cupoch
Or install cupoch from source.
git clone https://github.com/neka-nat/cupoch.git --recurse
cd cupoch
mkdir build
cd build
cmake ..; make install-pip-package -j
You can also install cupoch using pip on Jetson Nano. Please set up Jetson using jetpack and install some packages with apt.
sudo apt-get install libxinerama-dev libxcursor-dev libglu1-mesa-dev
pip3 install cupoch
Or you can compile it from source. Update your version of cmake if necessary.
wget https://github.com/Kitware/CMake/releases/download/v3.16.3/cmake-3.16.3.tar.gz
tar zxvf cmake-3.16.3.tar.gz
cd cmake-3.16.3
./bootstrap -- -DCMAKE_USE_OPENSSL=OFF
make && sudo make install
cd ..
git clone https://github.com/neka-nat/cupoch.git --recurse
cd cupoch/
mkdir build
cd build/
export PATH=/usr/local/cuda/bin:$PATH
cmake -DBUILD_GLEW=ON -DBUILD_GLFW=ON -DBUILD_PNG=ON -DBUILD_JSONCPP=ON ..
sudo make install-pip-package
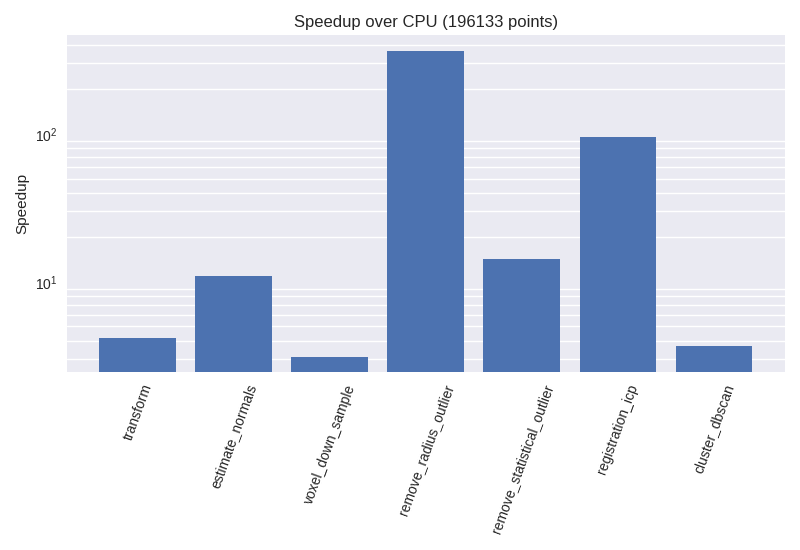
The figure shows Cupoch's point cloud algorithms speedup over Open3D. The environment tested on has the following specs:
You can get the result by running the example script in your environment.
cd examples/python/basic
python benchmarks.py
This demo works in the following environment.
# Launch roscore and rviz in the other terminals.
cd examples/python/ros
python realsense_rgbd_odometry_node.py
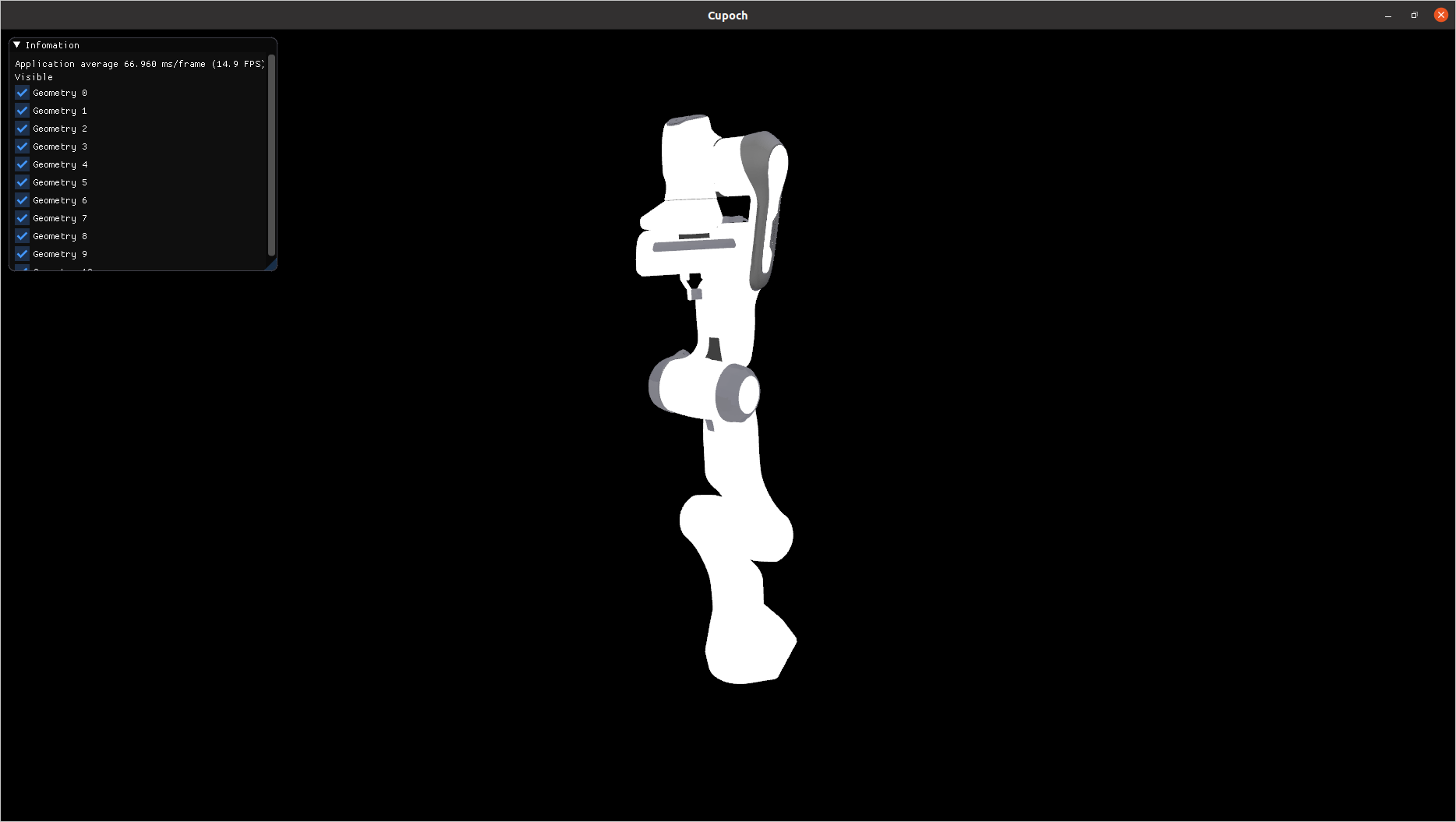
| Point Cloud | Triangle Mesh | Kinematics |
|---|---|---|
 |
 |
 |
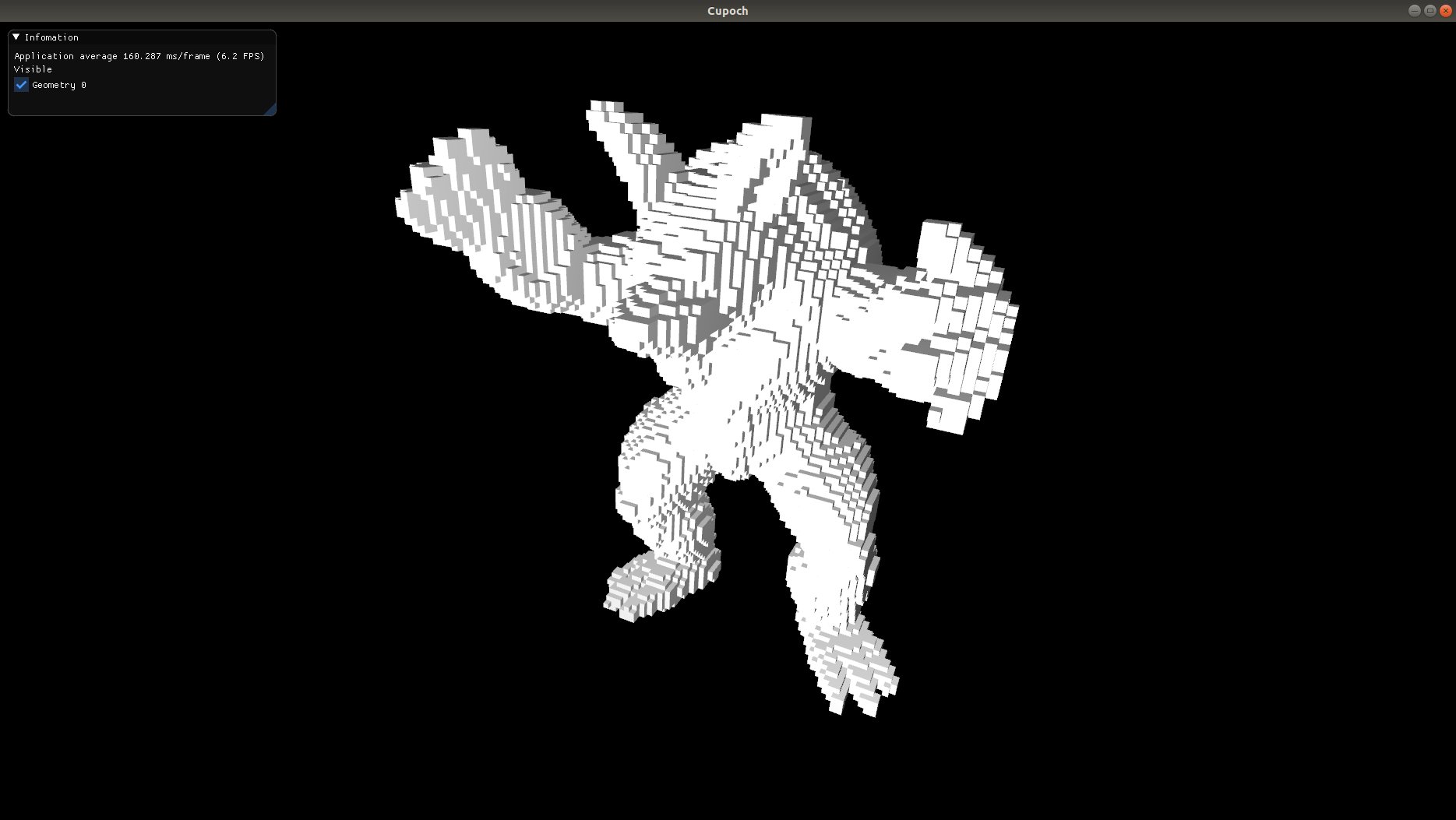
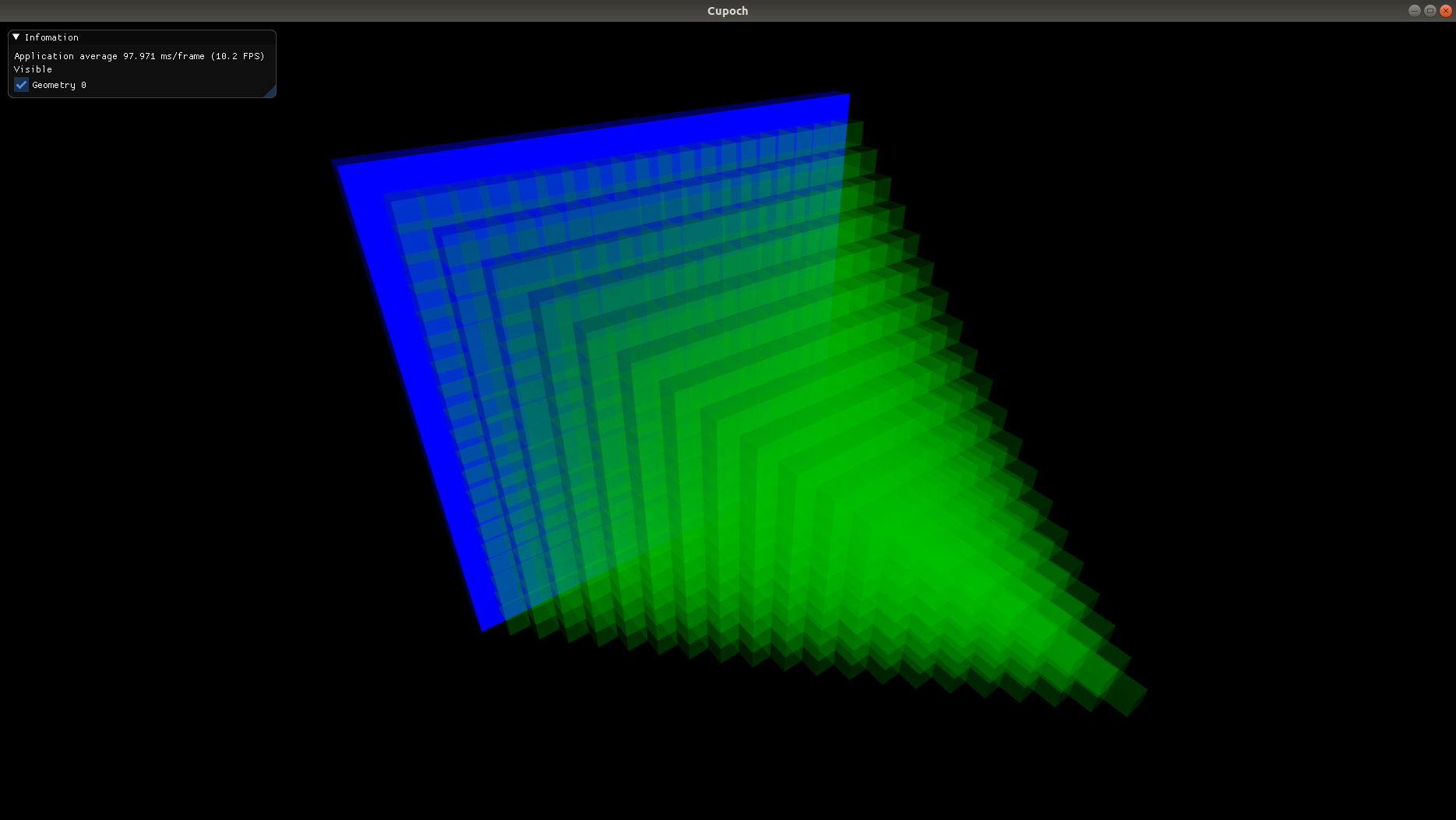
| Voxel Grid | Occupancy Grid | Distance Transform |
|---|---|---|
 |
 |
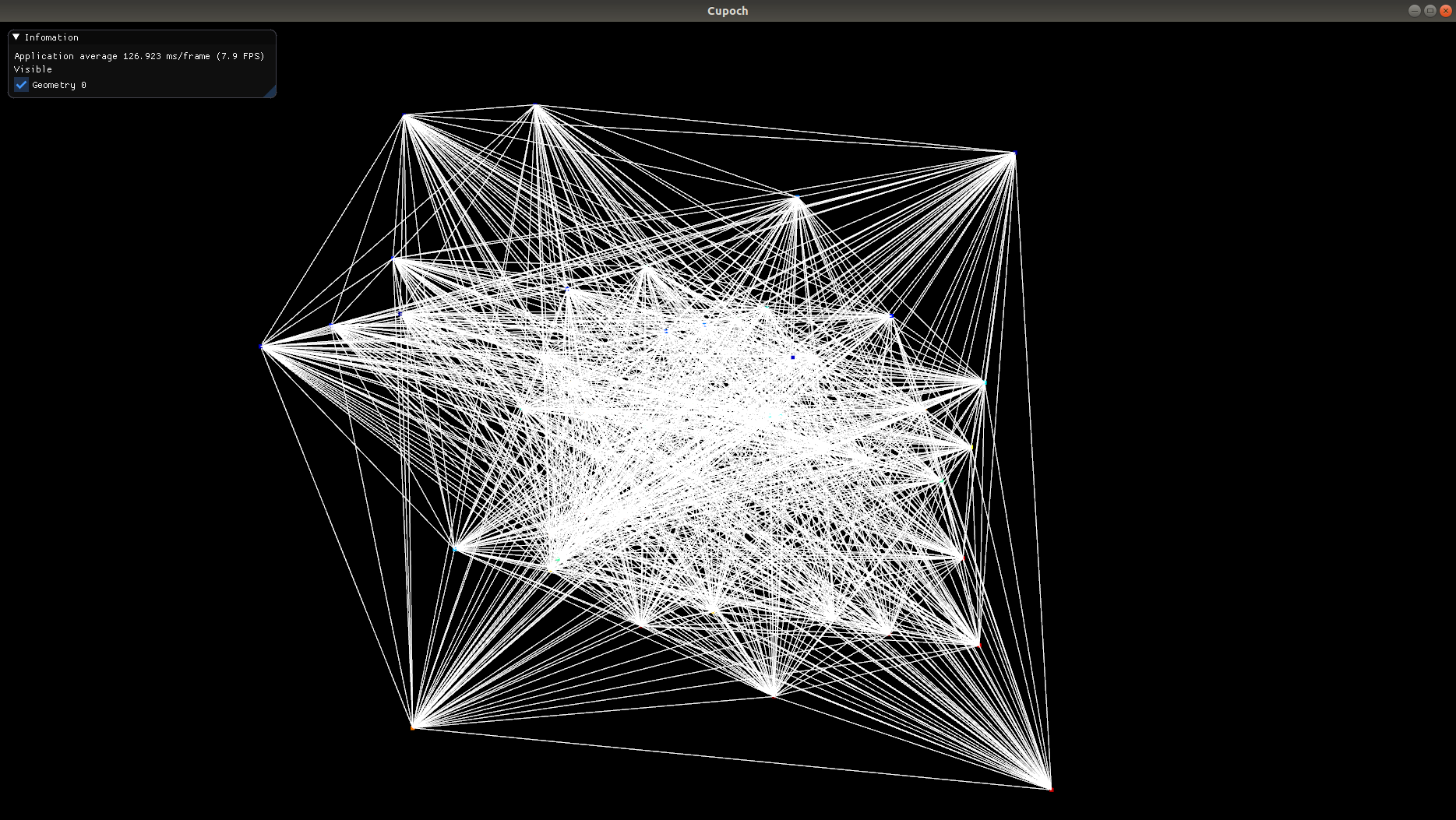
| Graph | Image |
|---|---|
 |
 |
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。
1. 开源生态
2. 协作、人、软件
3. 评估模型





